Chapter 6: Basic Operation 53
99-04-23
—A terminal emulator or the terminal window of Robcomm3 communicating
through the front panel console port and having control of the robot at the
application shell. (If not, at the teach pendant, press Shift + ESC to transfer
control), or
• —The Command Prompt window of CROSnt communicating through the
SimSockD cable in the teach pendant’s port.Have a terminal running by having
either:
To move:
1. Turn on arm power.
2. Set the speed to a slow value such as
speed 10
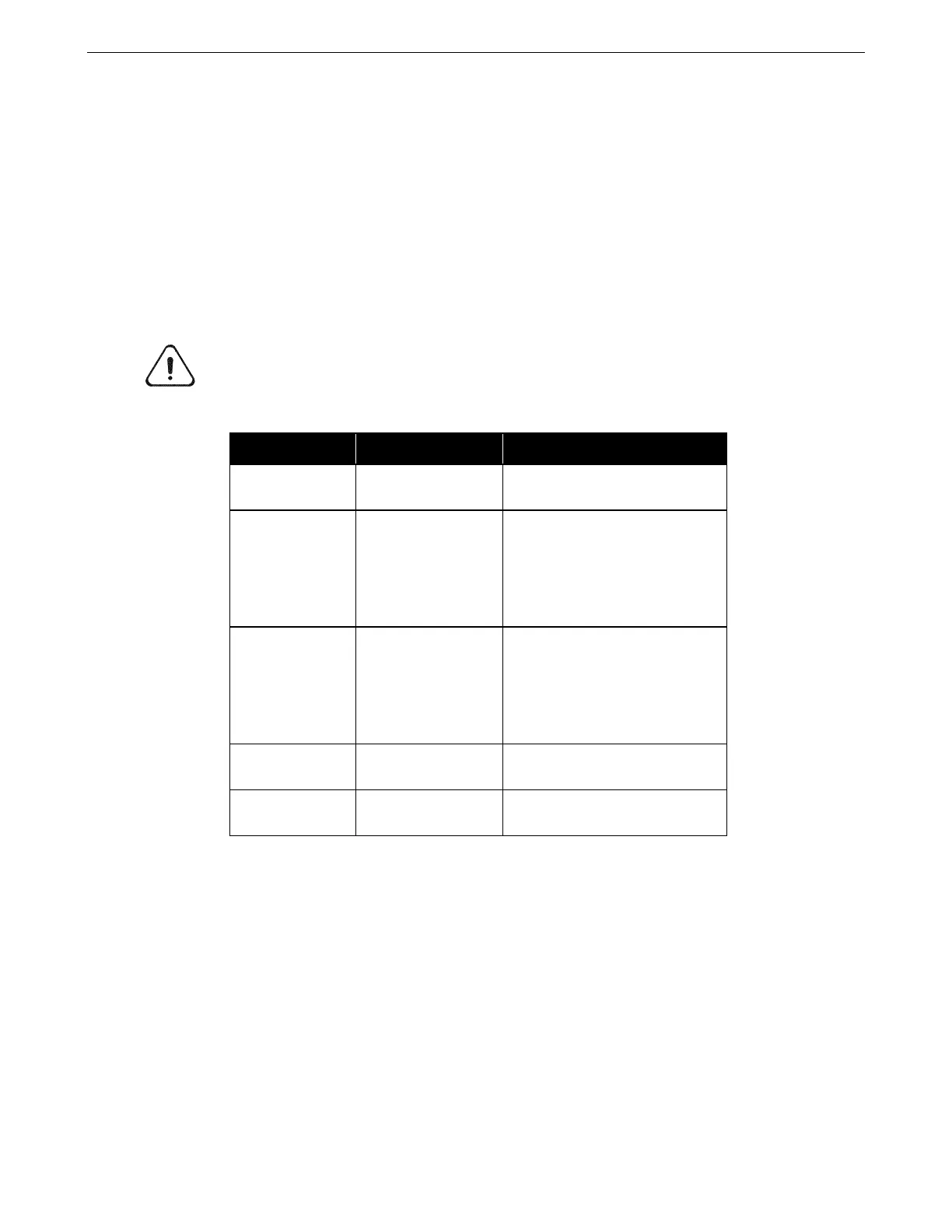
Warning! Be prepared to strike an e-stop. When you use a command from the
terminal, the robot attempts to move to the commanded position, without knowing if it is
safe to do so. Use the proper joint number and distance value to avoid a collision.
3. Enter motion commands with parameters.
Command Example Motion
joint joint 1, 22.5
joint 3, –45
rotates a joint by degrees
wx, wxs
wy, wys
wz, wzs
zrot, zrots
yrot, yrots
xrot, xrots
wx 7.5
wzs 2.5
xrots –45
moves along or rotates
around
a world cartesian axis
by current linear units (in. or
mm.) or degrees
tx, txs
ty, tys
tz, tzs
yaw, yaws
pitch, pitchs
roll, rolls
tx 3.5
tzs 1.5
pitch –45
moves along or rotates
around
a tool axis
by current linear units (in. or
mm.) or degrees
align align X
align –Z
aligns to a world axis
motor motor 2, 1000
motor 3, 25
rotates a motor by pulses
Further details of these commands are in RAPL-3’s Application Development Guide.