1-52 Min Speed Normal Magnetising [Hz]
Range: Function:
Use this parameter along with
parameter 1-50 Motor Magnetisation
at Zero Speed. See Illustration 4.6.
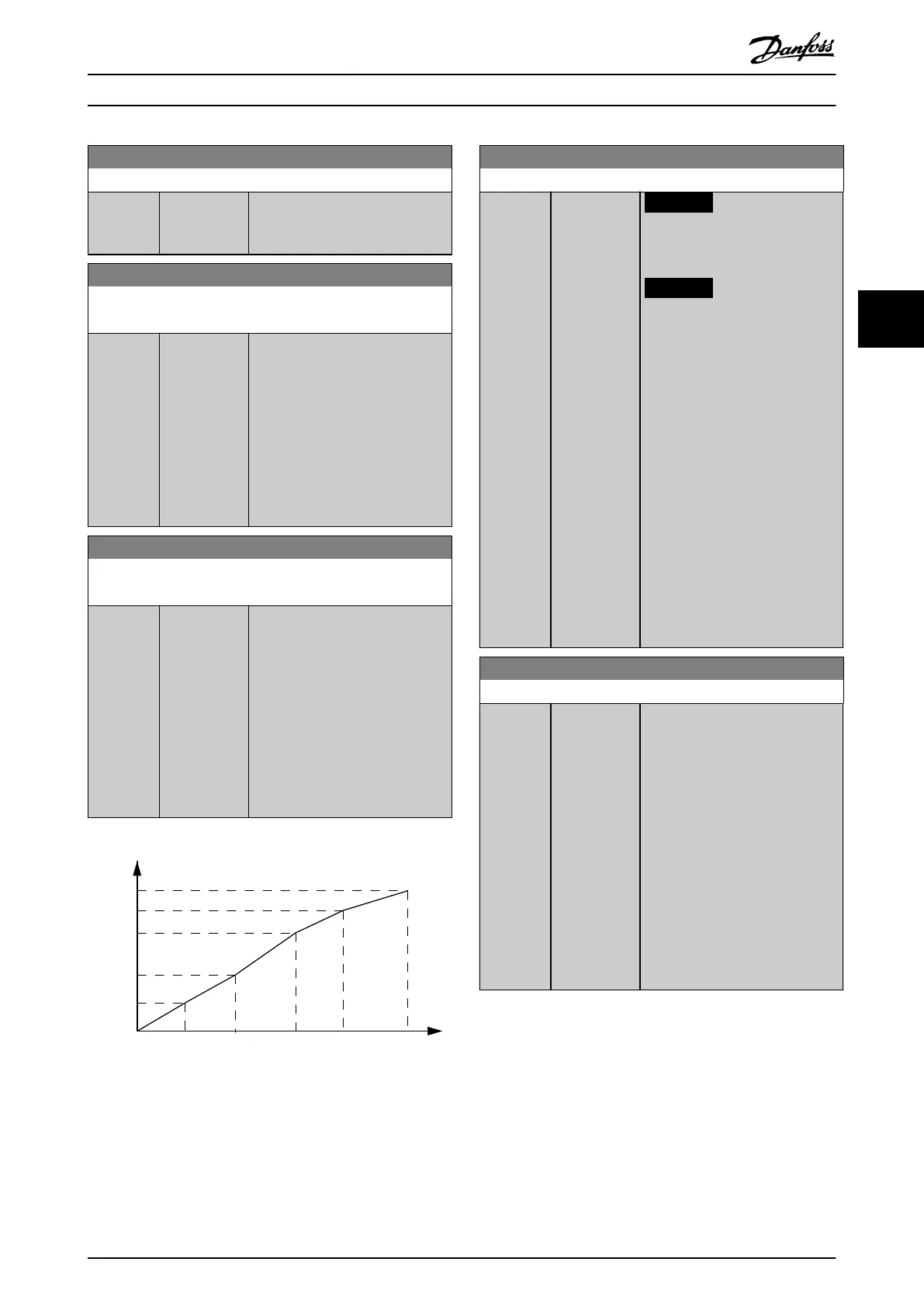
1-55 U/f Characteristic - U
Array [6]
Range: Function:
Size
related*
[0 - 1000 V] Enter the voltage at each frequency
point to form a U/f characteristic
manually matching the motor.
The frequency points are dened in
parameter 1-56 U/f Characteristic - F.
This parameter is an array
parameter [0-5] and is only
accessible when
parameter 1-01 Motor Control
Principle is set to [0] U/f.
1-56 U/f Characteristic - F
Array [6]
Range: Function:
Size
related*
[ 0 - 1000.0
Hz]
Enter the frequency points to form
a U/f characteristic manually
matching the motor.
The voltage at each point is dened
in parameter 1-55 U/f Characteristic -
U.
This parameter is an array
parameter [0–5] and is only
accessible when
parameter 1-01 Motor Control
Principle is set to [0] U/f.
Motor Voltage
Par 1-55 [x]
Output Frequency
Par 1-56 [x]
1-55[5]
1-55[4]
1-55[3]
1-55[2]
1-55[1]
1-55[0]
1-56
[0]
1-56
[1]
1-56
[2]
1-56
[3]
1-56
[4]
1-56
[5]
130BA166.10
Illustration 4.7 U/f Characteristic
1-58 Flying Start Test Pulses Current
Range: Function:
Size
related*
[ 0 - 200 %]
NOTICE
This parameter is only
available in VVC
+
.
NOTICE
This parameter has eect on
PM motors only.
Sets the current level for the ying
start test pulses that are used to
detect the motor direction. 100%
means I
m,n
. Adjust the value to be
high enough to avoid noise
inuence, but low enough to avoid
aecting the accuracy (current must
be able to drop to 0 before the
next pulse). Reduce the value to
reduce the generated torque.
Default is 30% for asynchronous
motors, but may vary for PM
motors. For adjusting PM motors,
the value tunes for back EMF and
d-axis inductance of the motor.
1-59 Flying Start Test Pulses Frequency
Range: Function:
Size
related*
[ 0 - 500 %] Asynchronous motor: Set the
frequency of the ying start test
pulses that are used to detect the
motor direction. For asynchronous
motors, the value 100% means that
the slip is doubled. Increase this
value to reduce the generated
torque.
For synchronous motors, this value
is the percentage n
m,n
of the free-
running motor. Above this value,
ying start is always performed.
Below this value, the start mode is
selected in parameter 1-70 Start
Mode
Parameter Descriptions Programming Guide
MG06J202 Danfoss A/S © 03/2019 All rights reserved. 41
4 4
 Loading...
Loading...









