3-19 Jog Speed [RPM]
Range: Function:
Size
related*
[ 0 - par. 4-13
RPM]
Enter a value for the jog speed
n
JOG
, which is a xed output speed.
The frequency converter runs at
this speed when the jog function is
activated. The maximum limit is
dened in parameter 4-13 Motor
Speed High Limit [RPM].
See also parameter 3-80 Jog Ramp
Time.
4.4.3 3-4* Ramp 1
For each of the 4 ramps (parameter groups 3-4* Ramp 1,
3-5* Ramp 2, 3-6* Ramp 3, and 3-7* Ramp 4) congure the
ramp parameters:
•
Ramp type,
•
Ramping times (duration of acceleration and
deceleration), and
•
Level of jerk compensation for S-ramps.
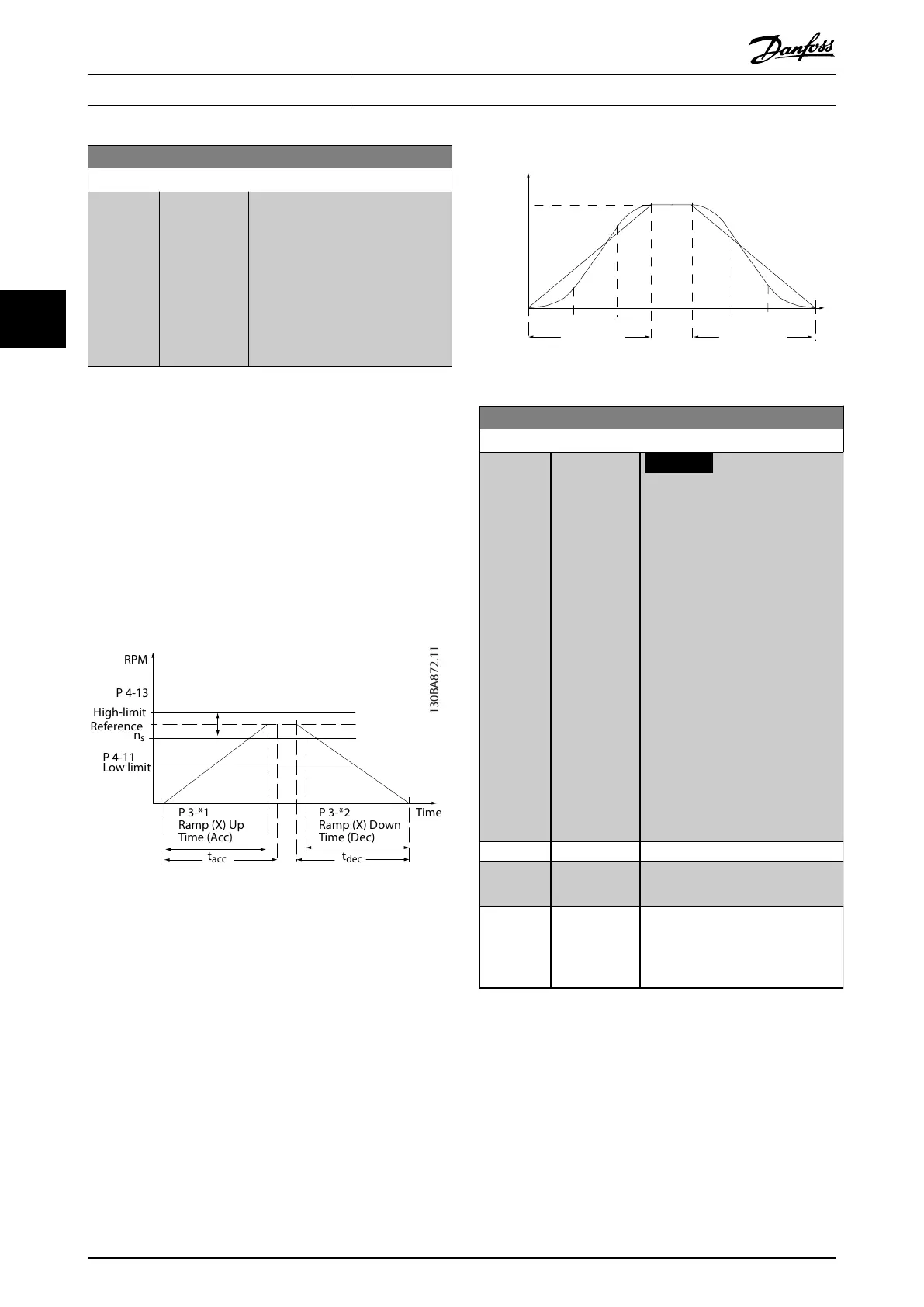
Start by setting the linear ramping times corresponding to
Illustration 4.18 and Illustration 4.19.
Illustration 4.18 Linear Ramping Times
If S-ramps are selected, set the level of non-linear jerk
compensation required. Set jerk compensation by dening
the proportion of ramp-up and ramp-down times where
acceleration and deceleration are variable (that is,
increasing or decreasing). The S-ramp acceleration and
deceleration settings are dened as a percentage of the
actual ramp time.
130BA168.10
Ramp (X) S-Ramp
Ratio at Accel.End
Jerk compensated
Ramp (X)
Up Time
Ramp (X)
S-Ramp
Ratio at
Accel.End
Linear
Speed
Ramp (X)
Down Time
Ramp (X)
S-Ramp
Ratio at
Dec.End
Ramp (X) S-Ramp
Ratio at Dec.End
Illustration 4.19 Linear Ramping Times
3-40 Ramp 1 Type
Option: Function:
NOTICE
If [1] S-ramp Const Jerk is
selected and the reference
during ramping is changed,
the ramp time may be
prolonged to realize a jerk-free
movement, which may result
in a longer start or stop time.
Extra adjustment of the S-
ramp ratios or switching
initiators may be necessary.
Select the ramp type, depending on
requirements for acceleration/
deceleration.
A linear ramp gives constant
acceleration during ramping. An S-
ramp gives non-linear acceleration,
compensating for jerk in the
application.
[0] * Linear
[1] S-ramp Const
Jerk
Acceleration with lowest possible
jerk.
[2] S-ramp Const
Time
S-ramp based on the values set in
parameter 3-41 Ramp 1 Ramp Up
Time and parameter 3-42 Ramp 1
Ramp Down Time.
Parameter Descriptions VLT® AutomationDrive FC 361
54 Danfoss A/S © 03/2019 All rights reserved. MG06J202
44
 Loading...
Loading...









