Chapter 7 Motion Control ASDA-A2
Revision February, 2017 7-3
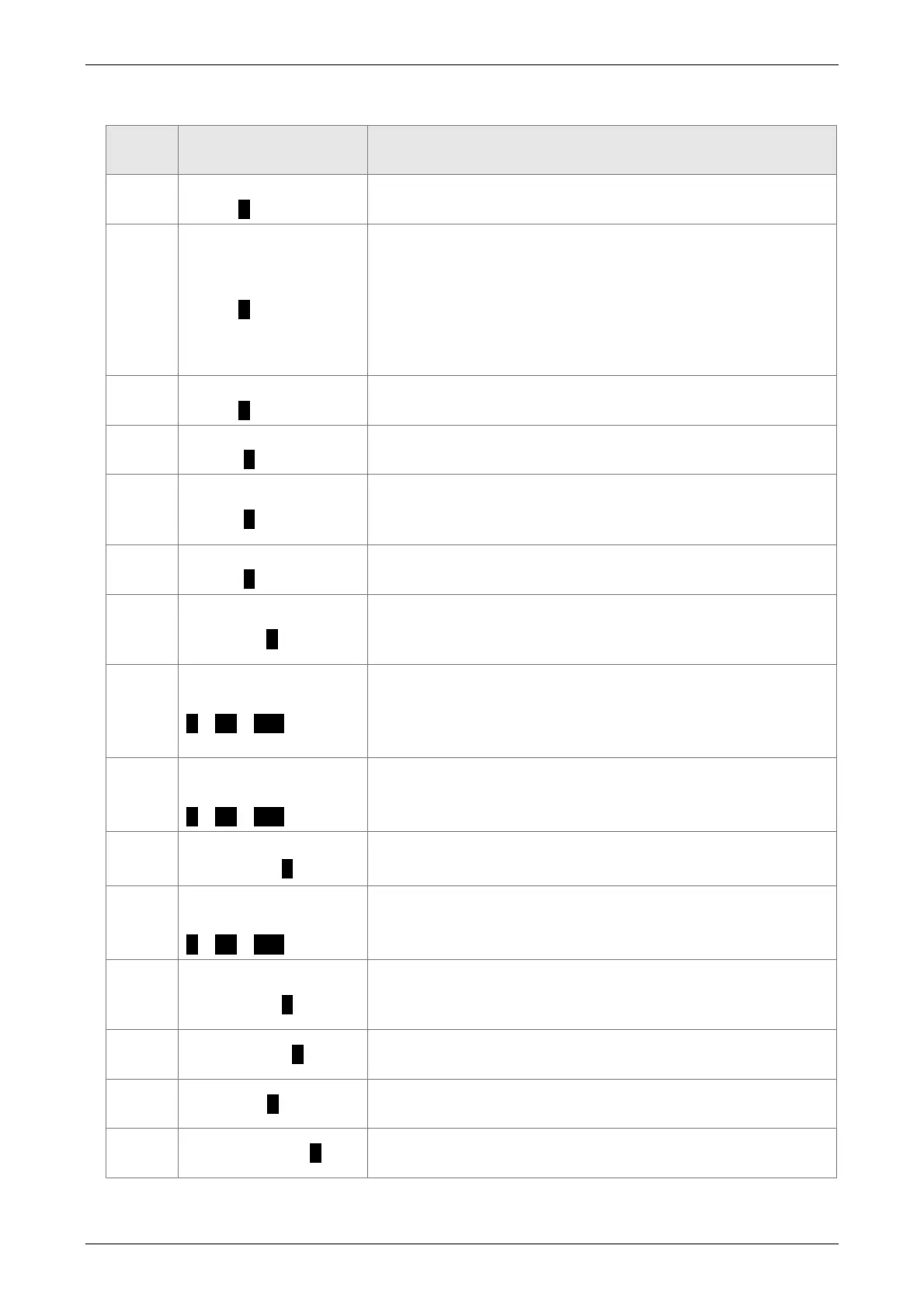
Explanation of monitoring variables:
Code
Name of Variables /
Attribute
Descriptions
000
(00h)
Feedback position
(PUU) B
The current feedback position of the motor encoder. The
unit is PUU (user unit).
001
(01h)
Position command
(PUU) B
The current coordinate of position command. The unit is
PUU (user unit).
PT mode: it represents the pulse number the servo drive
received.
PR mode: the value of absolute coordinate from position
command
Equals to the pulse number sent by the controller.
002
(02h)
Position deviation
(PUU) B
The deviation between the position command and feedback
position. The unit is PUU (user unit).
003
(03h)
Feedback position
(pulse) B
Current feedback position of the motor encoder. The unit is
pulse (encoder unit).
004
(04h)
Position command
(pulse) B
The current coordinate of the position command. The unit is
pulse (encoder unit).
The command that had gone through E-gear.
005
(05h)
Position deviation
(pulse) B
The deviation between the position command and feedback
position. The unit is pulse (encoder unit).
006
(06h)
Pulse command
frequency B
Frequency of pulse command received by the servo drive.
The unit is Kpps.
It is suitable in PT/PR mode.
007
(07h)
Speed feedback
B D1 Dec
Current speed of the motor. The unit of rotary motor is 0.1
r/min.
The value is more stable since it has been though low-pass
filter.
008
(08h)
Speed command
(analog)
B D2 Dec
The speed command is issued by analog. The unit is 0.01
Volt.
009
(09h)
Speed command
(processed) B
The processed speed command. The source might be
analog, register or position loop.
010
(0Ah)
Torque command
(analog)
B D2 Dec
The torque command is issued by analog. The unit is 0.01
Volt.
011
(0Bh)
Torque command
(processed) B
The processed torque command. The unit is percentage
(%).
The source might be analog, register or speed loop.
012
(0Ch)
Average load B
Average load output by the servo drive. The unit is
percentage (%).
013
(0Dh)
Peak load B
The maximum load output by the servo drive. The unit is
percentage (%).
014
(0Eh)
DC Bus voltage B Capacitor voltage after rectification. The unit is Volt.

 Loading...
Loading...






