ASDA-B2-F Parameters
September, 2015 7-19
Bit Function Bit Function
8 HOME (Homing finished) 12 Reserved
9 OLW (Early warning for overload) 13 Reserved
10
WARN (When servo warning, CW, CCW, EMGS, under
voltage or communication error occurs, DO is ON)
14 Reserved
11 Reserved 15 Reserved
P0-49■ UAP Renew Encoder Absolute Position
ddress: 0062H
0063H
Operational
Interface:
Panel / Software Communication
Related
Section:
-
Default: 0
Control
Mode:
ALL
Unit: - Range: 0x00 ~ 0x02
Format: HEX Data Size: 16-bit
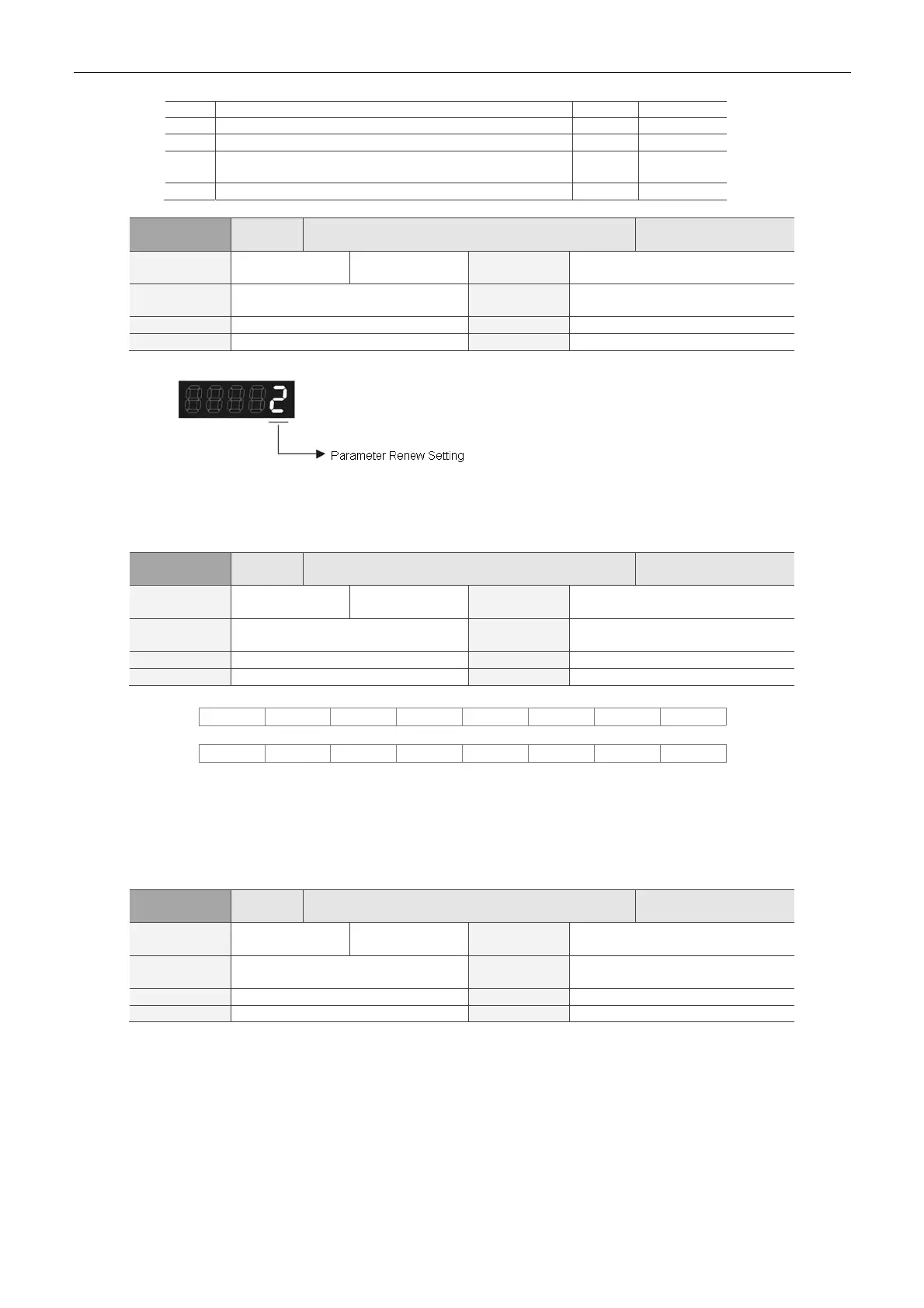
Settings:
Parameter renew setting:
1: Renew the encoder data to parameters P0-50 ~ P0-52 only.
2: Renew parameters P0-50 ~ P0-52 and clear the position error as well. When this setting is
activated, the current position of the motor will be reset as the target position of position command.
P0-50★
APSTS Absolute Coordinate System Status
ddress: 0064H
0065H
Operational
Interface:
Panel / Software Communication
Related
Section:
-
Default: 0
Control
Mode:
ALL
Unit: - Range: 0x00 ~ 0x1F
Format: HEX Data Size: 16-bit
Settings:
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit
9
Bit 8
Bit 0: 1 means absolute position is lost; 0 means normal.
Bit 1: 1 means low battery; 0 means normal.
Bit 2: 1 means multiturn overflows; 0 means normal.
Bit 3: 1 means PUU overflows; 0 means normal.
Bit 4: 1 means the absolute coordinate system has not been set yet; 0 means normal.
Bit 5~ B it 15: Reserved (0).
P0-51★
APR Encoder Absolute Position (Multiturn)
ddress: 0066H
0067H
Operational
Interface:
Panel / Software Communication
Related
Section:
-
Default: 0
Control
Mode:
ALL
Unit: rev Range: -32768 ~ +32767
Format: DEC Data Size: 32-bit
Settings:
When Bit 1 of P2-70 is set to read the encoder pulse number, this parameter represents the turns
of encoder absolute position. When Bit 1 of P2-70 is set to read the PUU number, this parameter
will be disabled and the value of this parameter is 0.

 Loading...
Loading...





