Communications ASDA-B2-F
8-4 September, 2015
8
8.3 MODBUS Communication Protocol
There are two modes of MODBUS network communication: ASCII (American Standard Code for
Information Interchange) and RTU (Remote Terminal Unit). Users could set the desired
communication mode via P3-02. Apart from these two communication modes, this servo drive
also supports functions of accessing more than one data (03H), writing one character (06H) and
writing multiple characters (10H). Please refer to the following descriptions.
Code Description
ASCII Mode:
In ASCII mode, data are transmitted in ASCII (American Standard Code for Information
Interchange) format. When transmitting data 64H between two stations (Master and Slave), the
master will send 36H to represent ‟6” and 34H to represent “4”.
ASCII code for digits 0 to 9 and characters A to F are as follows:
Character ‘0’ ‘1’ ‘2’ ‘3’ ‘4’ ‘5’ ‘6’ ‘7’
ASCII Code 30H 31H 32H 33H 34H 35H 36H 37H
Character ‘8’ ‘9’ ‘A’ ‘B’ ‘C’ ‘D’ ‘E’ ‘F’
ASCII Code 38H 39H 41H 42H 43H 44H 45H 46H
RTU Mode:
Every 8-bit data is constituted by two 4-bit characters (hexadecimal). If data 64H is transmitted
between two stations, it will be transmitted directly, which is more efficient than ASCII mode.
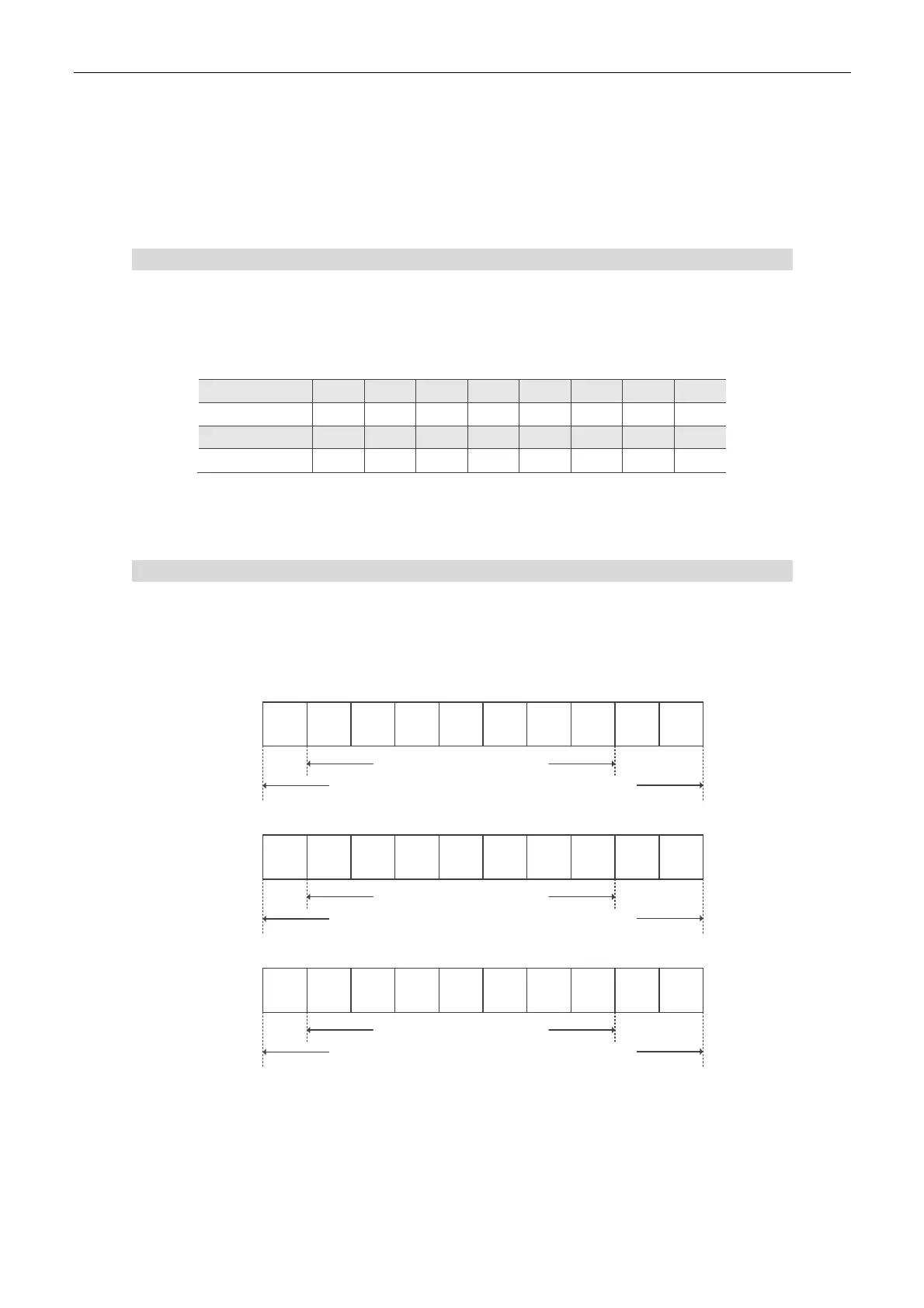
Character Structure
Characters will be encoded into the following framing and transmitted in serial. The checking
method of different bit is as the following.
10-bit character frame (for 7-bit character)
7N2
Start
bit
Stop
bit
Stop
bit
0123456
7-data bits
10-bit character frame
LHH
7E1
Start
bit
Even
Parity
Stop
bit
0123456
7-data bits
10-bit character frame
LH
7O1
Start
bit
Odd
Parity
Stop
bit
0123456
7-data bits
10-bit character frame
LH