Chapter 12 Description of Parameter SettingsC2000
12.1-02-5
Settings Functions Descriptions
16
Rotating speed
command form ACI
ON: force the source of the frequency to be ACI. If the rotating
speed commands are set to AVI, ACI and AVI at the same time,
the priority is AVI > ACI.> AUI
17
Rotating speed
command form AUI
ON: force the source of the frequency to be AUI. If the rotating
speed commands are set to AVI, ACI and AVI at the same time,
the priority is AVI > ACI.> AUI
18
Forced to Stop
(Pr. 07-20)
ON: the drive ramps to stop according to the Pr.07-20 setting.
19 Digital up command
ON: the frequency of the drive increases or decreases by one
unit. If this function remains ON continuously, the frequency
increases or decreases according to Pr.02-09 / Pr.02-10.
The Frequency command returns to zero when the drive stops,
and the displayed frequency is 0.00 Hz. If you select Pr.11-00, bit
7 = 1, the frequency is not saved.
20 Digital down command
21 PID function disabled ON: the PID function is disabled.
22 Clear the counter
ON: the current counter value is cleared and displays 0. The
drive counts up when this function is disabled.
23
Input the counter value
(MI6)
On: the counter value increases by 1. Use the function with
Pr.02-19.
24 FWD JOG command
This function is valid when the source of the operation command
is external terminal. ON: the drive executes forward JOG. When
executing the JOG command in torque mode, the drive
automatically switches to speed mode. The drive returns to
torque mode after the JOG command is complete.
25 REV JOG command
This function is valid when the source of the operation command
is external terminal. ON: the drive executes reverse JOG. When
executing the JOG command in torque mode, the drive
automatically switches to speed mode. The drive returns to
torque mode after the JOG command is complete.
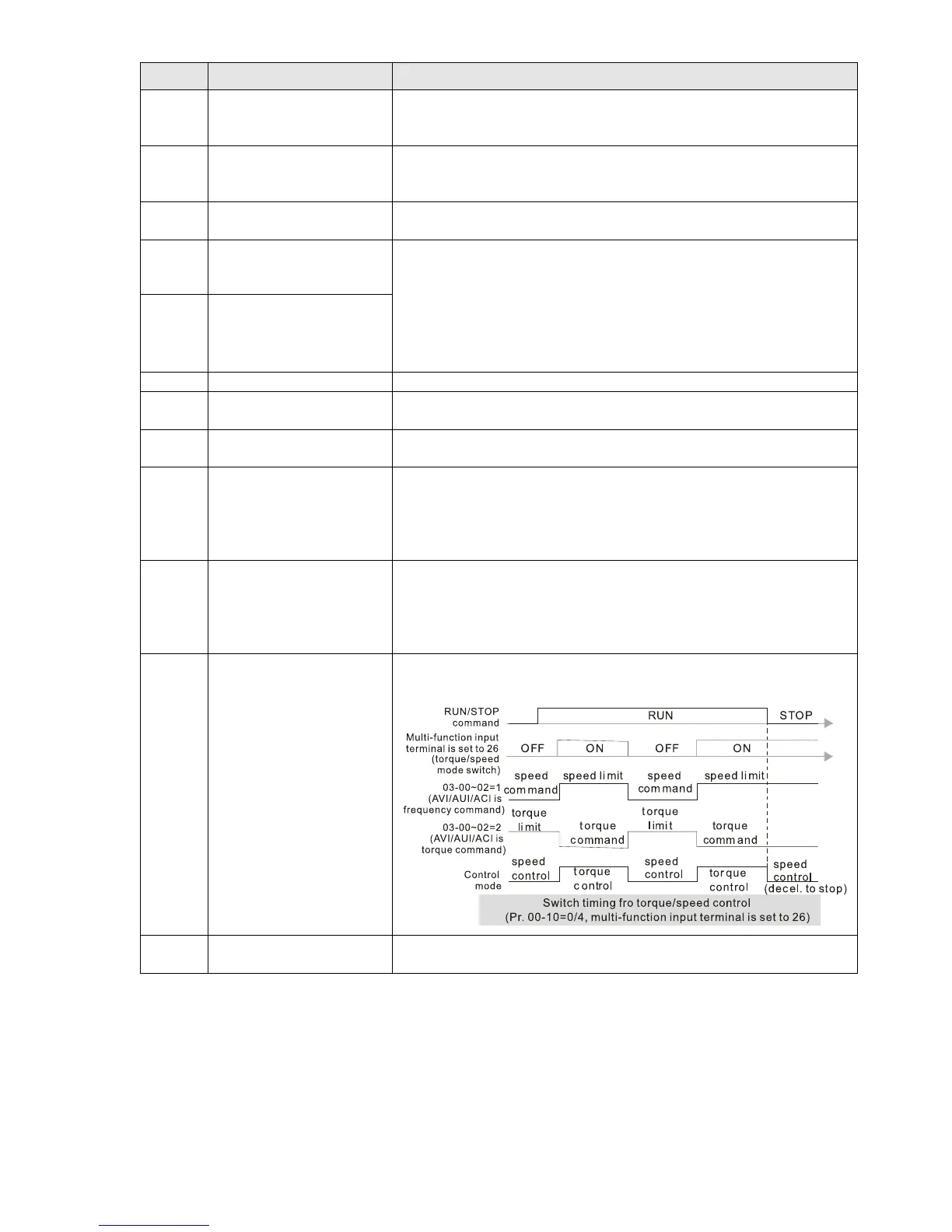
26
TQC / FOC mode
selection
ON: TQC mode.
OFF: FOC mode.
27 ASR1/ ASR2 selection
ON: the speed is adjusted by the ASR 2 setting. OFF: the speed
is adjusted by the ASR 1 setting. Refer to Pr.11-02 for details.