Chapter 16 PLC Function ApplicationsC2000
16-150
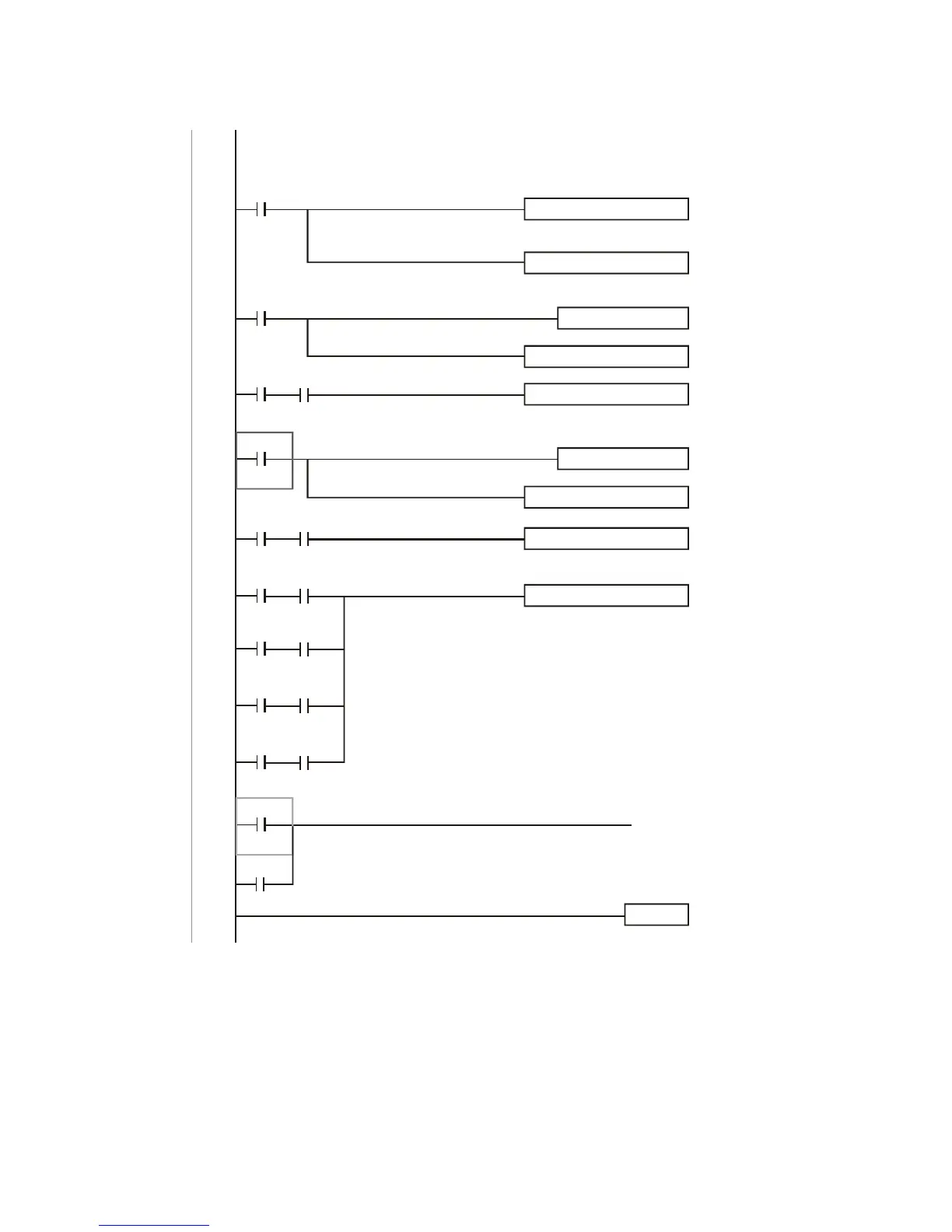
Part 3: Point-to-point movement; switch to position mode (set D1060 = 1), and move back and forth
between position points. (+300000 – -300000 )
M202
M101
MOV
K1 D1060
Set control mode (0:V)
END
P2P mode
33
20
43
M201
M1064
49
59
81
Ack
P2P mode
MOV K1
K4M200
+300000
M200
DPOS
K300000
TMR T100 K10
+300000
TMR T101
K10
Target Position atta
-400000
DPOS K300000
TMR
T102 K10
M203
M1064
Ack
TMR T103 K10
Target Position atta
M200
T100
ROLP
K4M200 K1
+300000
+300000
M200
T100
+300000
M200
T100
+300000
M200
T100
+300000
M202
Ack
Ack
(M1048)
84
65
※ If homing is not needed in an application, the first and second parts can be skipped. However,
the M1040 condition from Part 1 must be included, and the writing method in Part 1 involve the
use of X2 to achieve direct access. In addition, when M101 is used at the beginning of Part 3 to
set the control mode, it can be rewritten as M1002, which will put the PLC immediately into the
position mode when it starts running.