Chapter 4 Configuring the Joint Parameters
66
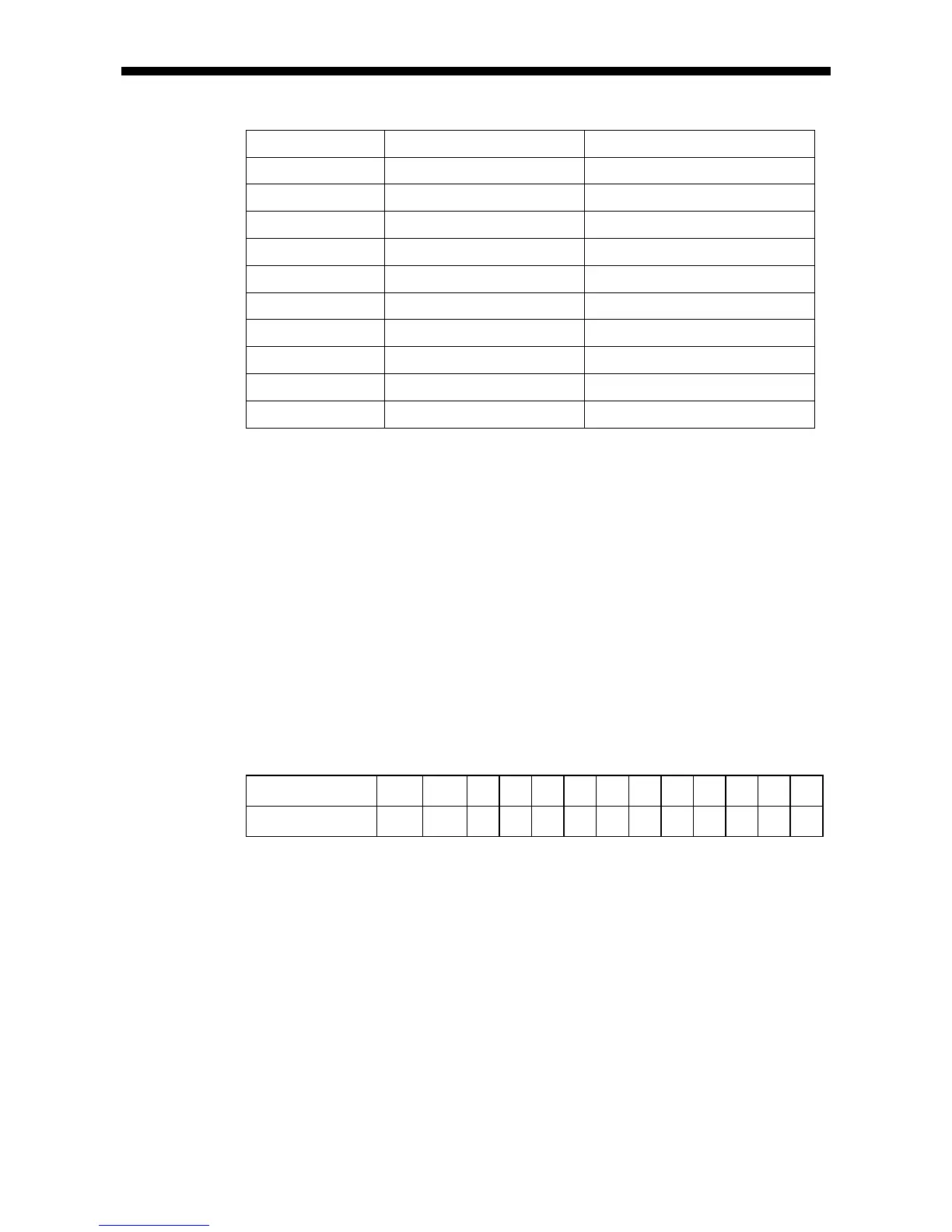
The drive current system gain is as listed below.
Motor Model Motor rated output Drive Current System Gain
SGMAH-A5A1A 50W 1.852E-05
SGMAH-01A1A 100W 3.004E-05
SGMAH-02A1A 200W 7.144E-05
SGMAH-04A1A 400W 1.093E-04
SGMAH-08A1A 750W 1.979E-04
SGMPH-01A1A 100W 3.421E-05
SGMPH-02A1A 200W 7.845E-05
SGMPH-04A1A 400W 1.209E-04
SGMPH-08A1A 750W 2.150E-04
SGMPH-15A1A 1500W 5.819E-04
(5) Speed control integral gain
Set the integral compensation gain of the speed control system. You may convert the
integral gain of the speed control loop into integral speed loop gain time constant
(ms) according to the following formula:
Integral speed loop gain time constant (ms) =
0.25 x [Speed control linear gain] / [Speed loop integral gain]
(Formula 4.7-4)
Increasing the value will decrease the integral time constant, making the speed
error converge faster at the end of joint motion. However, increasing the value for the
connected transmission mechanism having lower rigidity will decrease the
convergence of residual oscillation at the end of joint motion.
(6) Torque control filter
This value sets the band of the linear delay component for the torque control filter.
The table below lists the relationship between the value and the band.
Filter Set Value 3 4 5 6 7 8 9 10 11 12 13 14 15
Band (Hz) 2450 1080 843 682 559 460 377 305 241 184 133 85 41
(7) Torque offset
This value gives an offset to the torque control value of joint support system. If the
motor undergoes any unbalanced load due to the force of gravity, setting this value
will compensate the torque caused by the unbalanced load. The maximum offset
value you can set is equal to the rated output torque of the motor.
If you set a large torque offset at once, the connected mechanism may move in the
preset direction immediately after the motor power is turned on. Gradually change the
torque offset while confirming the current torque value and positioning error
waveform in the next item "4.7.2.2 Monitor of single-joint servo data."
As described in Section 4.7.1 "Auto Gain Tuning," the torque offset value will be
automatically set if you enable the gravity offset torque in auto gain tuning.