Chapter 1 Overview
1
Chapter 1 Overview
1.1 System Configuration
The SMT7 is a controller that controls the positioning mechanism driven by an AC
servomotor, e.g., X-Y table.
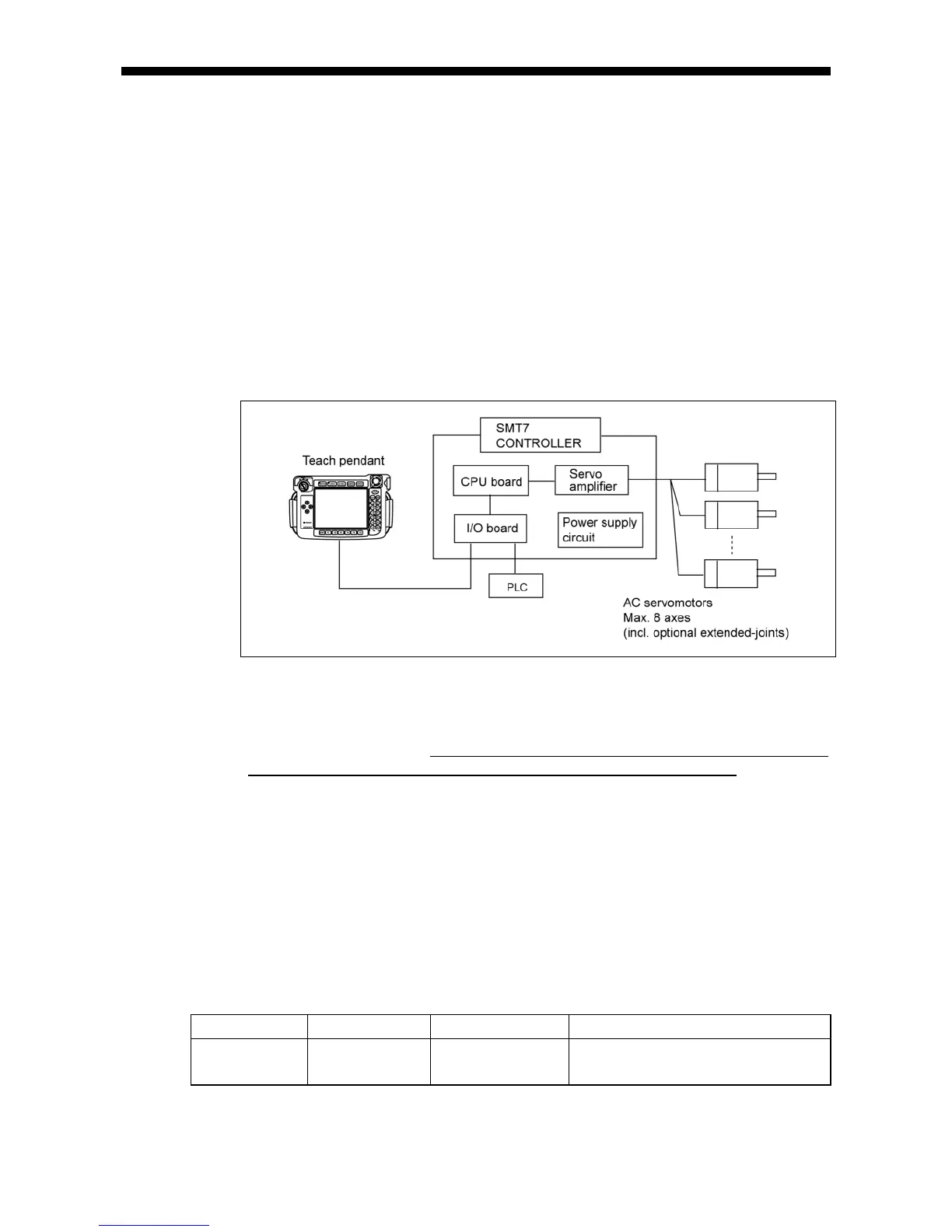
Shown below is a system configuration sample using the SMT7 controller.
First, move the X-Y table using the teach pendant to store the position into the
controller memory. At the same time, store other conditions for synchronizing with
external equipment (e.g., PLC).
After that, in an automatic operation, the controller drives the X-Y table as
programmed, reading out the data stored in the memory.
System Configuration
(1) Notes in operating the SMT7
The SMT7 is functionally equivalent to robot controllers except the SMT7 cannot
specify arm mechanisms. Using any of the following motions and commands in the
SMT7, therefore, may cause an unexpected movement. It is dangerous.
CP motion
(linear interpolation MOVE L or circular interpolation MOVE C)
TOOL movement
ROTATE command
Coordinate instruction movement (DRAW)
PALT command
APPROACH command
DEPART command
(2) Drive capacity
The motor capacity that can be driven by the SMT7 is as listed below.
SMT7 controller Motor Capacity Total Drive Capacity Note
1st to 6th axes
1500 W max./axis 3000 W max.
3rd to 6th axes:
Restricted to
1200 W or its equivalent
Note: Use AC servomotors specified in Chapter 3.
Note: The total drive capacity does not change even when optional extended-joints are in
use.