Chapter 4 Configuring the Joint Parameters
79
■ Releasing the currently held arm group
To release the currently held arm group, execute a GIVEARM command.
An occurrence of an error or program termination automatically releases the
currently held arm group.
For details about the GIVEARM, refer to the Programmer's Manual I, Section 14.3
"Arm Semaphore."
Example: Halt or Step Stop does not release the currently held arm group.
■ Restrictions on the application of arm groups
Two or more programs can run concurrently as long as their arm groups specified do
not hold the same joint(s).
If their arm groups hold the same joint(s), only one program can run and arm group
related lines in other programs cannot execute during execution of the currently
running program.
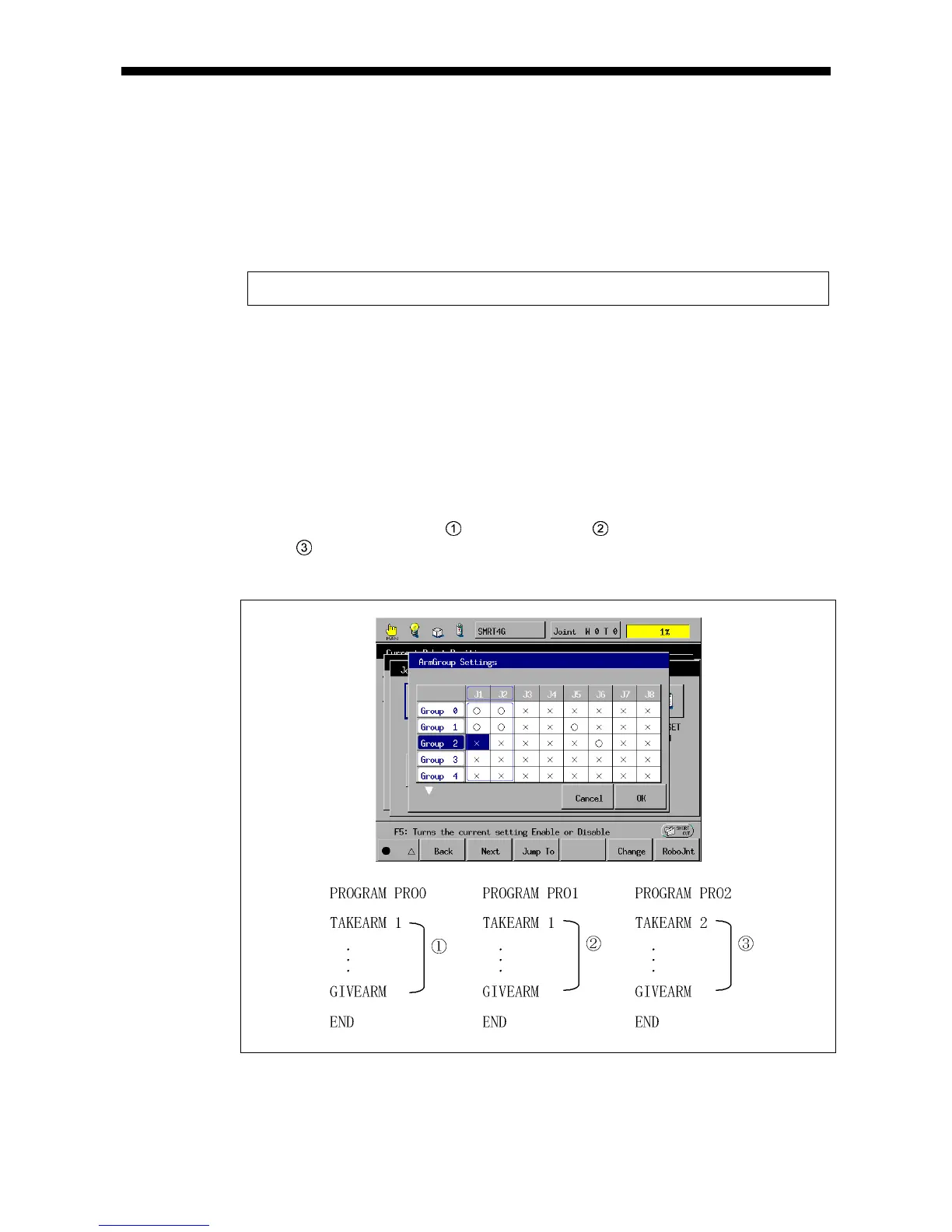
Example: In an extended-joint motion
During execution of codes
in PRO0, codes in PRO1 cannot execute, but
codes
in PRO2 can execute concurrently.
Example: Extended-joint motion setting