36 Unidrive M SI-PROFIBUS User Guide
Issue Number: 3
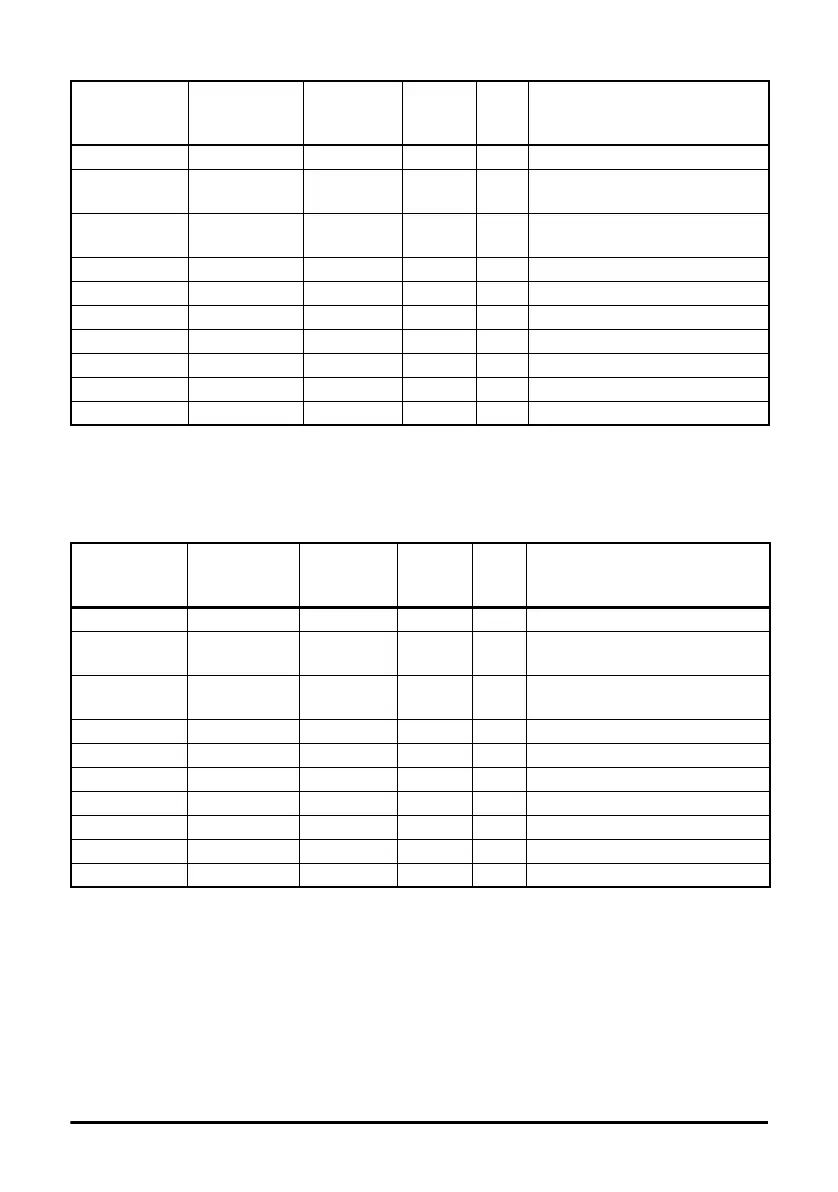
Table 6.6 Mapping parameters
It is advisable to keep 16-bit parameters paired together. This prevents mis-alignment of
cyclic data with 32-bit PLC registers when using auto-mapping facilities to configure the
SI-PROFIBUS network. By swapping the mappings for input channel 2 with input
channel 3, and moving output channel 5 to output channel 2, the data channel structure
will appear as shown in the table below.
Data channel Data words
used
Mapping
for slot 3
Setting Data
width
(bits)
Mapping status
IN channel 1 IN word 0, 1 Pr 3.02.001 0.10.040 16 Pr 10.040, status word
IN channel 2 IN word 2, 3 Pr 3.02.002 0.02.001 32
Pr 02.001, post-ramp speed
reference
IN channel 3 IN word 4, 5 Pr 3.02.003 0.04.020 16
Pr 04.020, Motor load as % of
rated motor load
IN channel 4 IN word 6, 7 Pr 3.02.004 0.14.021 16 Pr 14.021, PID1 feedback
IN channel 5 IN word 8, 9 Pr 3.02.005 0.14.001 16 Pr 14.001, PID1 output
OUT channel 1 OUT word 0, 1 Pr 3.03.001 0.06.042 16 Pr 06.042, control word
OUT channel 2 OUT word 2, 3 Pr 3.03.002 0.01.021 32 Pr 01.021, preset reference 1
OUT channel 3 OUT word 4, 5 Pr 3.03.003 0.02.011 32 Pr 02.011, acceleration rate 1
OUT channel 4 OUT word 6, 7 Pr 3.03.004 0.02.021 32 Pr 02.021, deceleration rate 1
OUT channel 5 OUT word 8, 9 Pr 3.03.005 0.14.020 16 Pr 14.020, PID1 reference
Data channel Data words
used
Mapping
for slot 3
Setting Data
width
(bits)
Mapping status
IN channel 1 IN word 0 Pr 3.02.001 0.10.040 16 Pr 10.040, status word
IN channel 2 IN word 1 Pr 3.02.002 0.04.020 16
Pr 04.020, Motor load as % of
rated motor load
IN channel 3 IN word 2, 3 Pr 3.02.003 0.02.001 32
Pr 02.001, post-ramp speed
reference
IN channel 4 IN word 4 Pr 3.02.004 0.14.021 16 Pr 14.021, PID1 feedback
IN channel 5 IN word 5 Pr 3.02.005 0.14.001 16 Pr 14.001, PID1 output
OUT channel 1 OUT word 0 Pr 3.03.001 0.06.042 16 Pr 06.042, control word
OUT channel 2 OUT word 1 Pr 3.03.002 0.14.020 16 Pr 14.020, PID1 reference
OUT channel 3 OUT word 2, 3 Pr 3.03.003 0.01.021 32 Pr 01.021, preset reference 1
OUT channel 4 OUT word 4, 5 Pr 3.03.004 0.02.011 32 Pr 02.011, acceleration rate
OUT channel 5 OUT word 6, 7 Pr 3.03.005 0.02.021 32 Pr 02.021, deceleration rate 1