Digital Servo Controllers
DSV 130 / DSV 132 / DSV 133
Operating Manual Rev. 1.8 www.engelantriebe.de Page 8
4 Modes of Operation
The digital servo-controllers DSV13x can operate with brush-type DC motors and brushless permanent magnet
synchronous motors. It can be used as a current- (torque-), speed- or position controller. The configuration of the
device is done with a pc-software “DSerV” via a serial interface (COM/RS232). Changed parameters affect the drives
behaviour at once, but will be stored in the non-volatile memory not until the “save parameter” command is called.
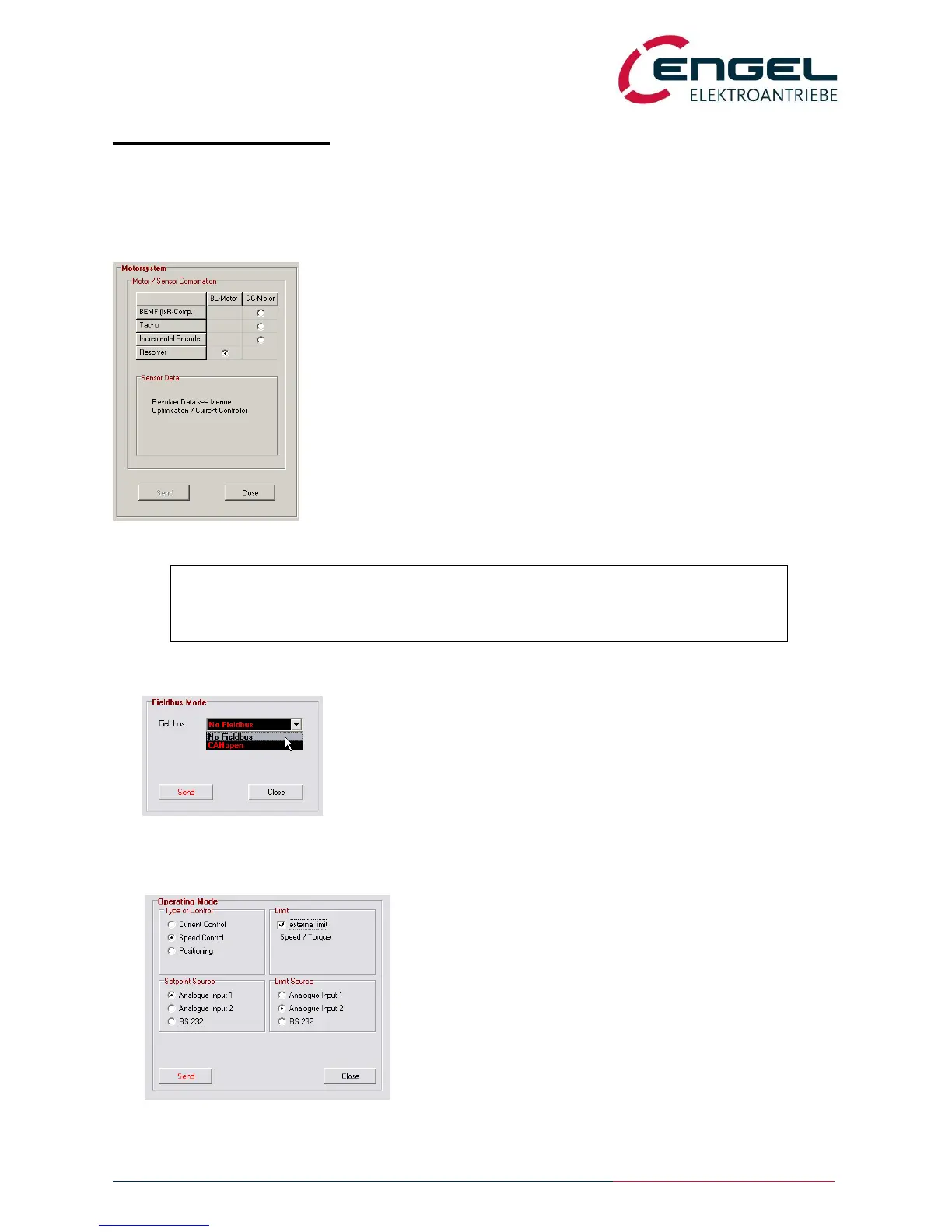
The currently used motor technology as well as the source of the feedback signals for
determining velocity and angle can be set in the DSerV menu OPTIMISATION /
MOTORSYSTEM.
Notice:
Please pay attention to the jumper setting (see chapter 6.3), it must correspond to the
selected velocity and angle feedback sensor.
The servo controller DSV13x is operated either by digital and analogue inputs and
outputs or via a CANopen fieldbus.
The decision if the CAN interface is used and the choice of node-ID and baudrate is
made in the menu OPTIMISATION / FIELDBUS.
The description of the DSV´s functionalities in this documentation assume operating by digital/analogue in- and
outputs (“no fieldbus”). The fieldbus- functionality, basically the same, is described in the CAN- Handbook.
When the DSV13x is operated by digital/analogue in- and outputs the
operating mode and the source of setpoint can be selected using menu
OPTIMISATION / OPERATING MODE.
With the option “limit” dynamic limits can be set in the operation modes
current and speed control. (chapter 4.4.1)