Digital Servo Controllers
DSV 130 / DSV 132 / DSV 133
Operating Manual Rev. 1.8 www.engelantriebe.de Page 29
9 Tuning the controller
When ordering a drive system consisting of servo controller and motor, the controllers will be pre-set to the motor data. If
needed, the speed controller has to be adjusted according to the concrete application.
If no parameter file for the motor is present, the current controller and the speed controller have to be adjusted according to
the proceedings described below.
9.1 Current controller tuning
Step 1: completely installed, wired and fully operational according to the set-up notes in chapter 7.
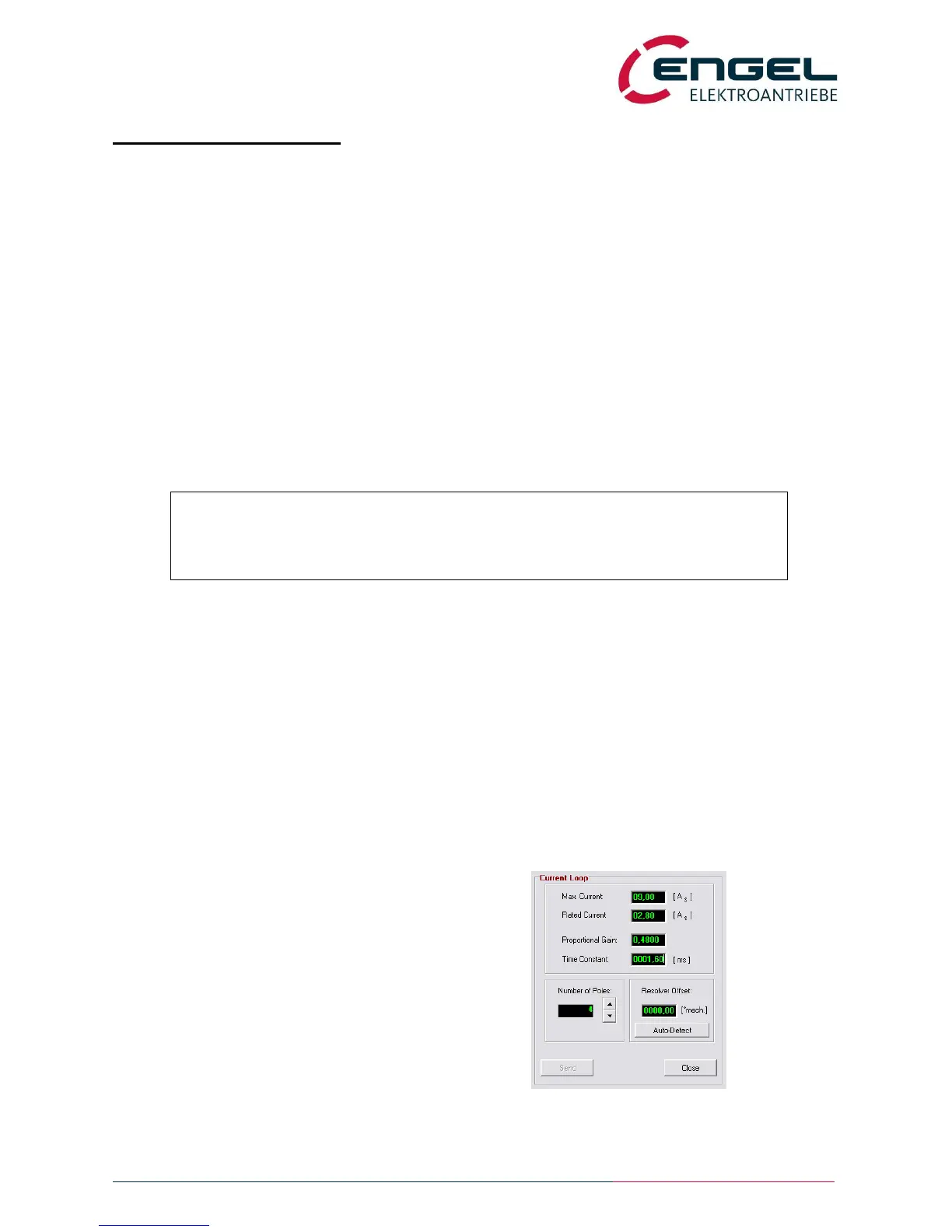
Step 2: Adjust parameters for rated and maximum current in the menu OPTIMISATION / CURRENT CONTROLLER.
Rated and maximum current can be found in the motor’s datasheet or on its name plate. As for geared
motors, the maximum current is usually decided by the gear’s maximum power and can be significantly
lower than stated on the name plate. Refer to the gear’s or geared motor’s datasheet.
According to an ENGEL standard, all currents are given as peak values. RMS values have to be converted:
I
Scheitel
= I
eff
x 2
Step 3: The current controller’s proportional gain can be calculated as follows:
Notice:
The approach described below provides approximate values for proportional gain and
time constant, which can vary from the ideal configuration in particular cases. The
approach also applies for three-phase synchronous motors.
Proportional Gain = R
a
* T
a
* 2000
R
a
=> Resistance between two motor phases [], specified in the datasheet
T
a
=> Electrical time constant [s], specified in the datasheet
Step 4: The current controller’s time constant is equal to the one of the motor:
Time constant = T
a
T
a
=> Electrical time constant [s] as specified in the datasheet
Example: Tuning the current controller for motor BSR2650-R2.4 24V 4500UPM.
From the datasheet:
rated current: I
N
= 30 A
max current : I
s
= 125 A
resistance: Ra = 0.1
time conststant: Ta = 0.7 ms
Proportional gain
k
p
= R
a
* T
a
* 2000
= 0.1 * 0,7ms * 2000 = 0.14
time constant = T
a
= 0.7ms
 Loading...
Loading...