Digital Servo Controllers
DSV 130 / DSV 132 / DSV 133
Operating Manual Rev. 1.8 www.engelantriebe.de Page 12
4.3.1 Homing
Homing is done to get the information about a defined machine position. Homing is a must if angle-sensors with
single-turn characteristics are used. The DSV supports different homing/referencing methods:
Homing through limit- / referencing- switches
The drive moves to the switch with a speed setpoint according to “speed during search for switch”. After the
switch is detected the drive reverses to “speed during search for zero”. The home position is detected, where the
switch is switching to inactive.
Homing against a mechanical stop
The drive moves to the preferably hard stop with a speed setpoint according to “speed during search for zero” and
a current limitation “max current during homing on mech stop”. The motor stop and its current rise are the criteria
for detecting the home position.
Attention!
When homing against mechanical stop is used…
… choose low speed setpoints to keep dynamic forces low appearing at stop!
… mind the possibly high torques and forces!
=> Calculate or estimate developing forces by the given current limitation and check the effect to
the entire system.
Homing must be done at least once after switching the DSV´s supply
power on. In position mode homing starts automatically after enabling
the controller for the first time.
If selected, homing can be performed each time after the controller is
enabled, too.
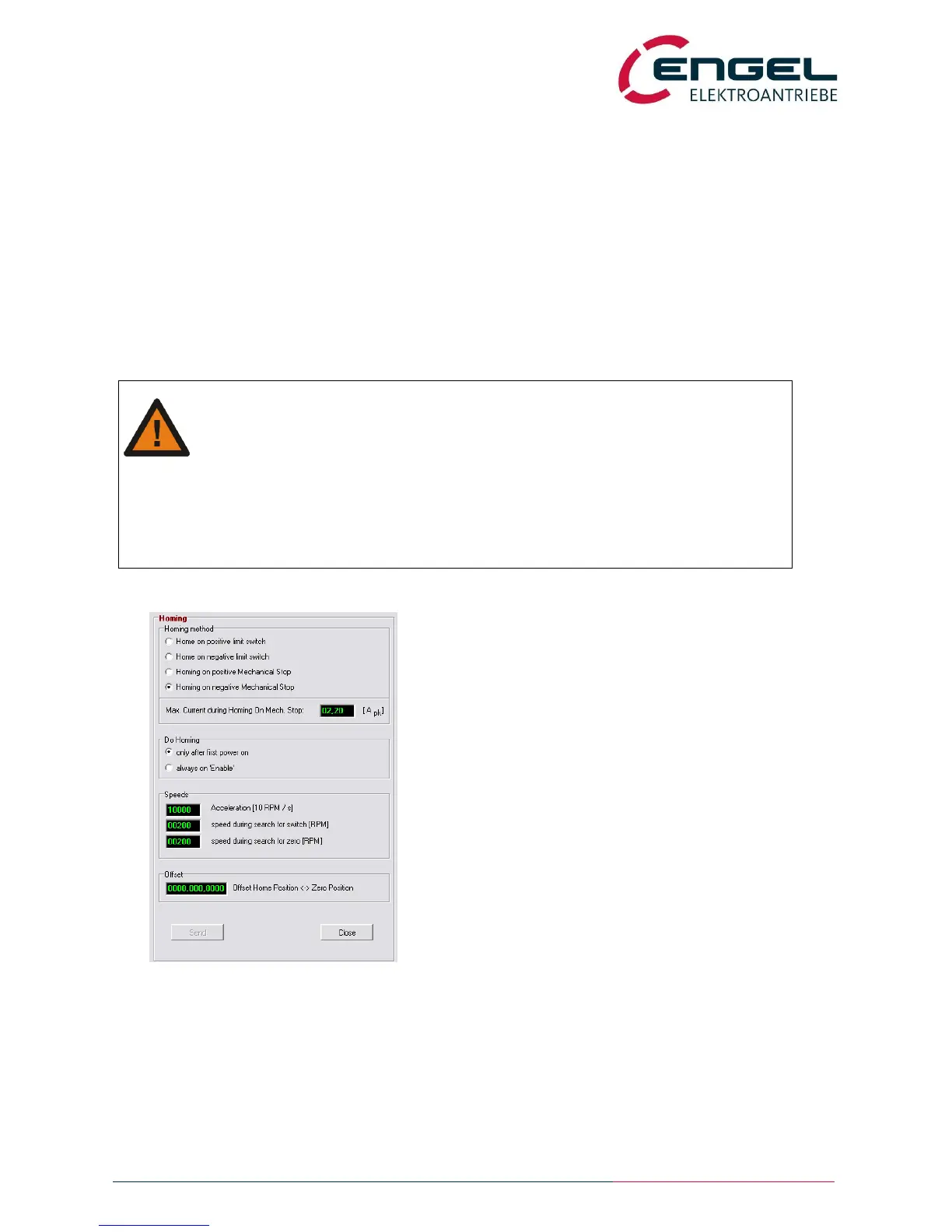
Homing configuration is done in the menu OPTIMISATION/ POSITIONING/
HOMING.
Homing method Defines the method (switches or mech. stop) and whether referencing is done in
negative or positive direction.
Do Homing Defines, if homing is done once or every time the controller is newly enabled.
Acceleration (Rotation-) Speed ramp for all the referencing speeds.
Unit: [10 rpm/second] => input value 1000 = 10,000 rpm/second
 Loading...
Loading...