5 Setting parameters
106 Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English
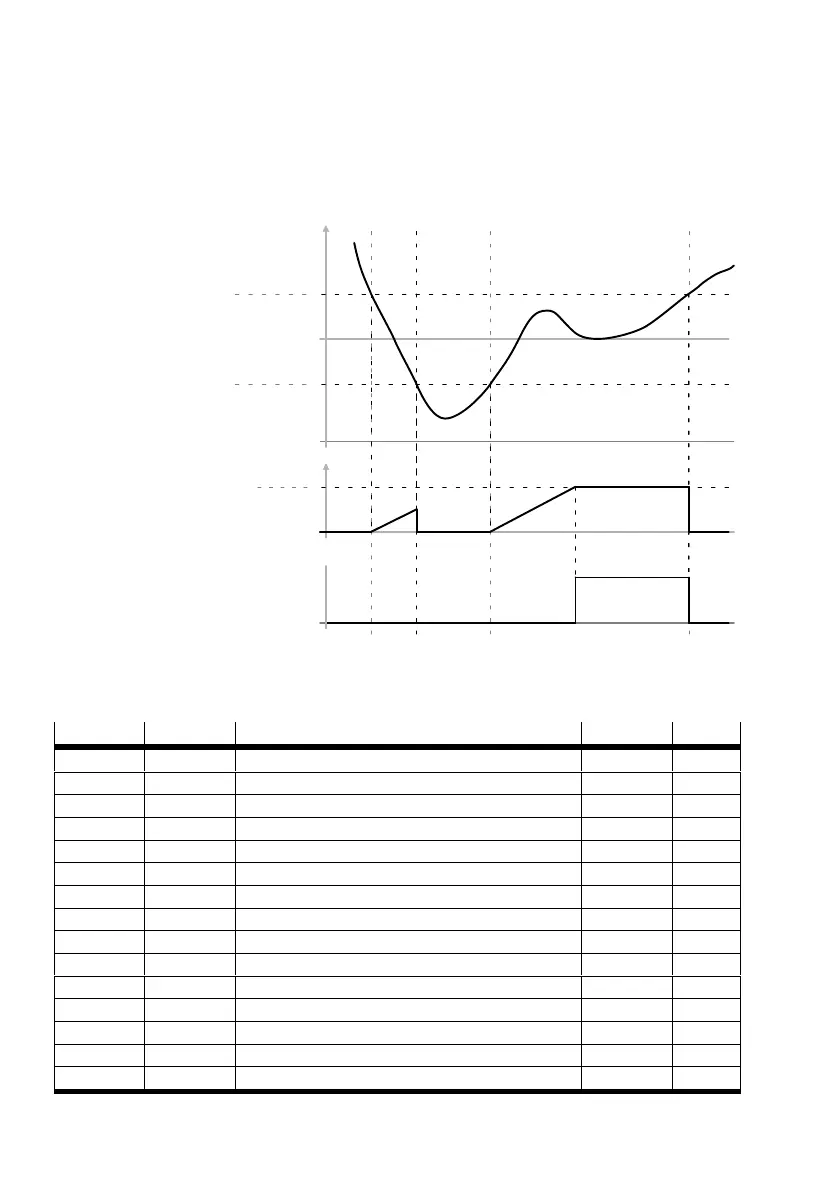
2. Position reached (position_reached)
This function offers the possibility of defining a position window around the target position (tar
get_position). If the actual position of the drive is located within this range for a specific time – the
position_window_time – the related bit 10 (target_reached) is set in the statusword.
Position_window (6067
h
)
Position_window_time (6068
h
)
Status word, bit 10 (6041
h
)
0
Position_window (6067
h
)
Fig. 5.7 Position reached – functional overview
Description of the objects
Objects treated in this chapter
Index Object Name Type Attr.
202D
h
VAR position_demand_sync_value INT32 ro
2030
h
VAR set_position_absolute INT32 wo
6062
h
VAR position_demand_value INT32 ro
6063
h
VAR position_actual_value_s
1)
INT32 ro
6064
h
VAR position_actual_value INT32 ro
6065
h
VAR following_error_window UINT32 rw
6066
h
VAR following_error_time_out UINT16 rw
6067
h
VAR position_window UINT32 rw
6068
h
VAR position_window_time UINT16 rw
607B
h
ARRAY position_range_limit INT32 rw
60F4
h
VAR following_error_actual_value INT32 ro
60FA
h
VAR control_effort INT32 ro
60FB
h
RECORD position_control_parameter_set rw
6510
h
_20
h
VAR position_range_limit_enable UINT16 rw
6510
h
_22
h
VAR position_error_switch_off_limit UINT32 rw
1) In increments

 Loading...
Loading...










