6 Device Control
Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English 159
controlword
Bit DescriptionFunction
8 halt In the Profile Position Mode:
If the bit is set, the ongoing positioning is interrup
ted. Braking is with the profile_deceleration. After
the process is ended, the bit target_reached is set
in the statusword. Deletion of the bit has no effect.
In the Profile Velocity Mode:
If the bit is set, the speed is reduced to zero. Brak
ing is with the profile_deceleration. Deletion of the
bit causes the motor controller to accelerate
again.
In the Profile Torque Mode:
If the bit is set, the torque is lowered to zero. This
occurs with the torque_slope. Deletion of the bit
causes the motor controller to accelerate again.
In the Homing Mode:
If the bit is set, the ongoing reference travel is in
terrupted. Deletion of the bit has no effect.
Tab. 6.5 controlword bit 4 … 8
6.1.4 Read-out of the motor controller status
Just as various status transitions can be triggered via the combination of several bits of the control
words, the status of the motor controller can be read out via the combination of various bits of the
statusword.
The following table lists the possible statuses of the status diagram as well as the related bit combina
tion, with which they are displayed in the statusword.
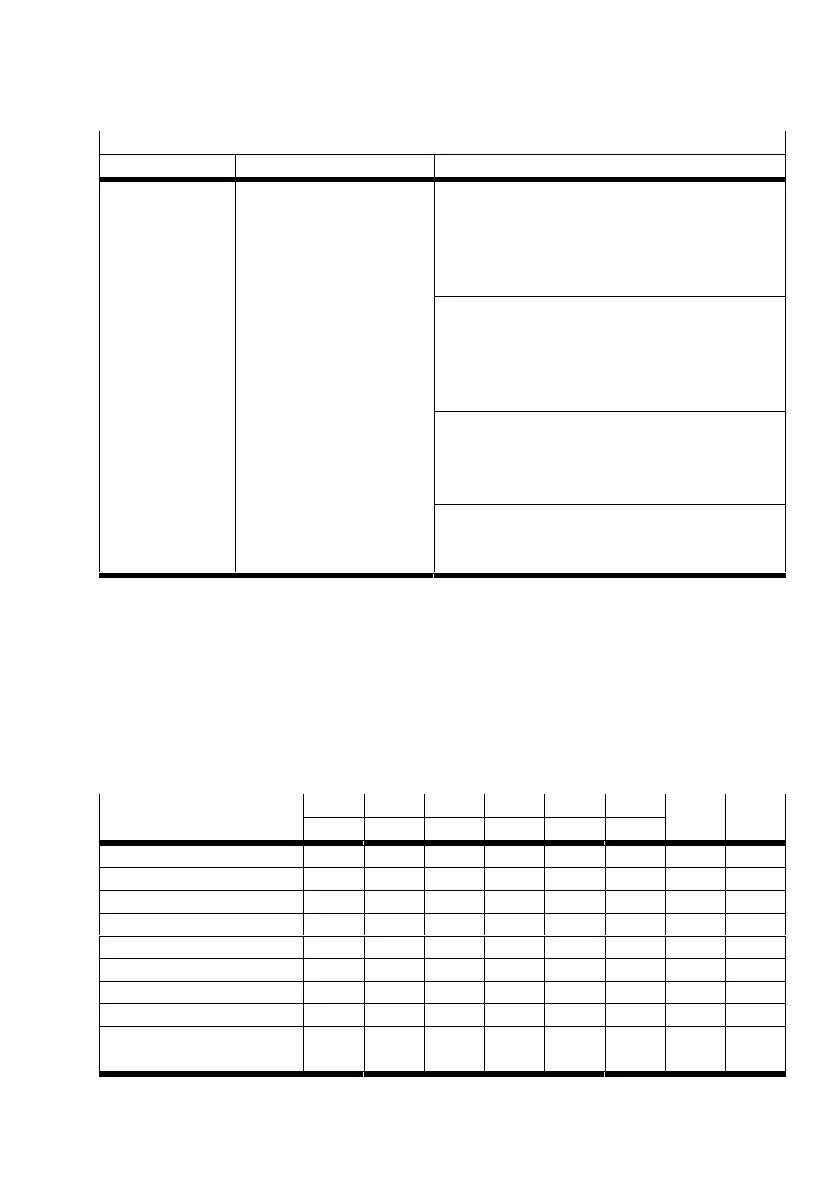
Status Bit 6 Bit 5 Bit 3 Bit 2 Bit 1 Bit 0 Mask Value
0040
h
0020
h
0008
h
0004
h
0002
h
0001
h
Not_Ready_To_Switch_On 0 x 0 0 0 0 004F
h
0000
h
Switch_On_Disabled 1 x 0 0 0 0 004F
h
0040
h
Ready_to_Switch_On 0 1 0 0 0 1 006F
h
0021
h
Switched_On 0 1 0 0 1 1 006F
h
0023
h
OPERATION_ENABLE 0 1 0 1 1 1 006F
h
0027
h
QUICK_STOP_ACTIVE 0 0 0 1 1 1 006F
h
0007
h
Fault_Reaction_Active 0 x 1 1 1 1 004F
h
000F
h
Fault 0 x 1 1 1 1 004F
h
0008
h
FAULT (in accordance with
CiA402)
1)
0 x 1 0 0 0 004F
h
0008
h
Tab. 6.6 Device status (x = not relevant)

 Loading...
Loading...










