4 EtherCAT interface
Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English 73
4.12.3 Transmit PDO configuration in the TxPDO node
The TxPDO node is used to specify the mapping for the Transmit PDOs and their assignment to a chan
nel of the Sync Manager. The configuration corresponds to that of the Receive PDOs from section
4.12.2 “Receive PDO configuration in node RxPDO” with the difference that the node “Name” of the
PDO must be set to “Inputs”, not “Outputs”.
4.12.4 Initialisation commands via the “Mailbox” node
The “Mailbox” node in the device description file is used to describe CANopen objects via the master in
the slave during the initialisation phase. The commands and objects to be described there are specified
via special entries. These entries specify the phase transition at which this value is to be written. Fur
thermore, such entries contain the object number (index and sub-index) as well as the data value to be
written and comments.
A typical entry has the following form:
<InitCmd>
<Transition>PS</Transition>
<Index#x6060</Index>
<SubIndex>0</SubIndex>
<Data>03</Data>
<Comment>velocity mode</Comment>
</InitCmd>
In the example above, status transition PS from “Pre-Operational” to “Safe Operational” sets the oper
ating mode in the CANopen object “modes_of_operation” to “Speed adjustment”. The individual sub
nodes have the following significance:
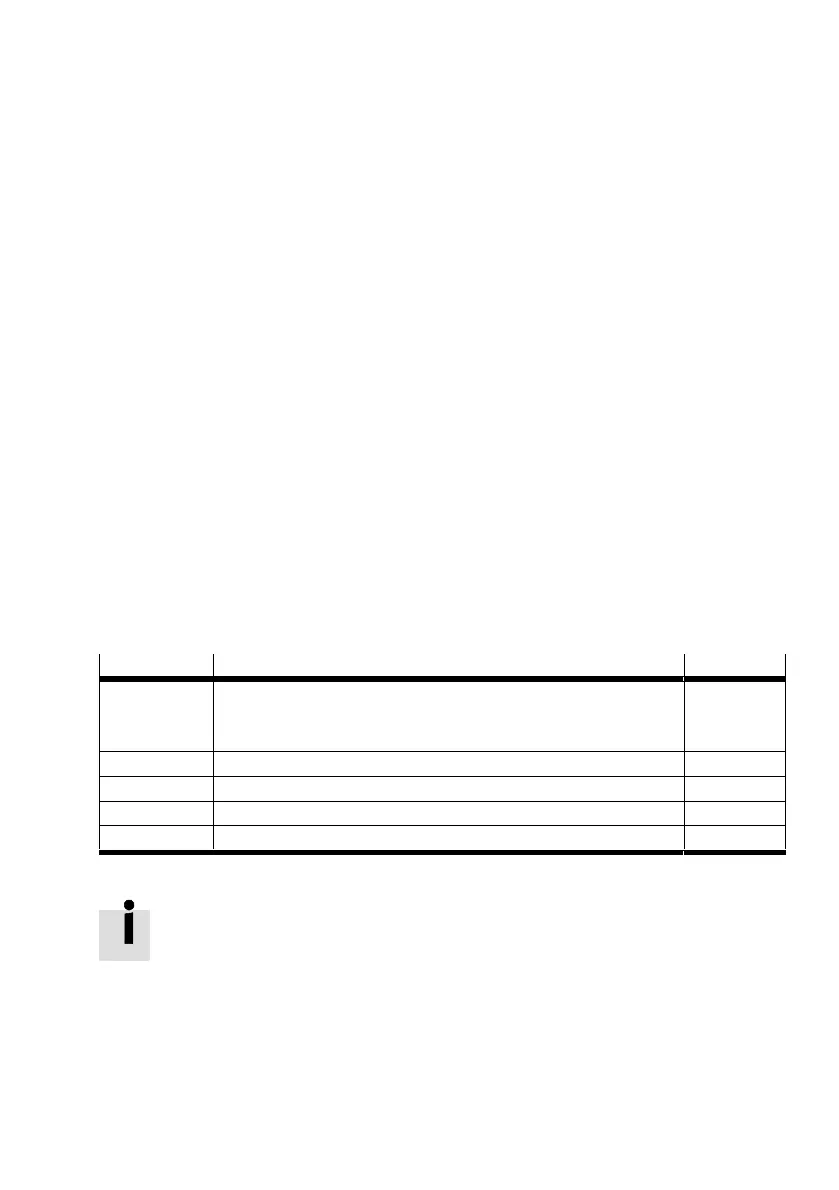
Node name
Significance Adaptable
Transition Name of the status transition for which this command should be
executed
( chapter 4.7 “Communication Finite State Machine”)
Yes
Index Index of the CANopen object to be written Yes
Sub-index Sub-index of the CANopen object to be written Yes
Data Data value to be written, as a hexadecimal value Yes
Comment Comment on this command Yes
Tab. 4.20 Elements of the node “InitCmd”
Important:
In a device description file for the motor controller CMMP-AS-...-M3, some entries in this
section are already assigned. These entries must remain as they are and may not be
changed by the user.

 Loading...
Loading...










