4 EtherCAT interface
Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English 51
4.6 CANopen communication interface
User protocols are tunnelled via EtherCAT. For the CANopen-over-EtherCAT protocol (CoE) supported by
the CMMP-AS-...-M3, most objects for the communication layer are supported by EtherCAT in accord
ance with CiA301. This primarily involves objects for setting up communication between masters and
slaves.
For the CANopen Motion Profile in accordance with CiA 402, most objects which can also be operated
via the standard CANopen fieldbus are supported. In general, the following services and object groups
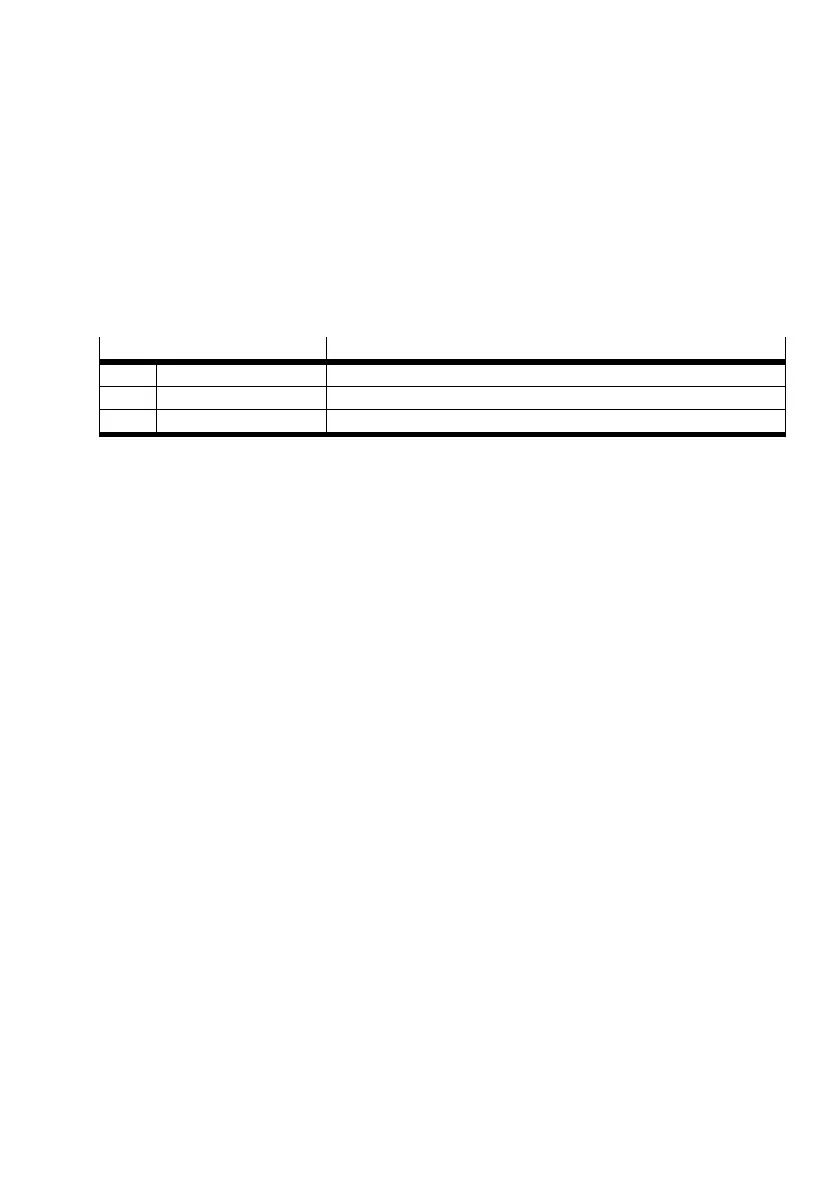
are supported by the EtherCAT CoE implementation in the motor controller CMMP-AS-...-M3:
Services/object groups Function
SDO Service Data Object Used for normal parametrisation of the motor controller.
PDO Process Data Object Fast exchange of process data (e.g. actual speed) possible.
EMCY Emergency Message Transmission of error messages.
Tab. 4.5 Supported services and object groups
The individual objects which can be addressed via the CoE protocol in the motor controller CMMP-
AS-...-M3 are internally forwarded to the existing CANopen implementation and processed there.
However, some new CANopen objects are added under the CoE implementation under EtherCAT, which
are required for special connection via CoE. This is the result of the revised communication interface
between the EtherCAT protocol and the CANopen protocol. A so-called Sync Manager is used to control
the transmission of PDOs and SDOs via the two EtherCAT transfer types (mailbox and process data
protocol).
This Sync Manager and the necessary configuration steps for operation of the CMMP-AS-...-M3 under
EtherCAT-CoE are described in chapter 4.6.1 “Configuration of the Communication Interface”. The addi
tional objects are described in chapter 4.6.2 “New and revised objects under CoE”.
Also, some CANopen objects of the CMMP-AS-...-M3, which are available under a normal CANopen
connection, are not supported via a CoE connection over EtherCAT.
A list of the CANopen objects not supported under CoE is provided in chapter 4.6.3
“Objects not supported under CoE”.
4.6.1 Configuration of the Communication Interface
As already described in the previous chapter, the EtherCAT protocol uses two different transfer types
for transmission of the device and user protocols, such as the CANopen-over-EtherCAT protocol (CoE)
used by the CMMP-AS-...-M3. These two transfer types are the mailbox telegram protocol for non-cyclic
data and the process data telegram protocol for transmission of cyclic data.
These two transfer types are used for the different CANopen transfer types for the CoE protocol. They
are used as follows:

 Loading...
Loading...










