7 Operating modes
Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English 195
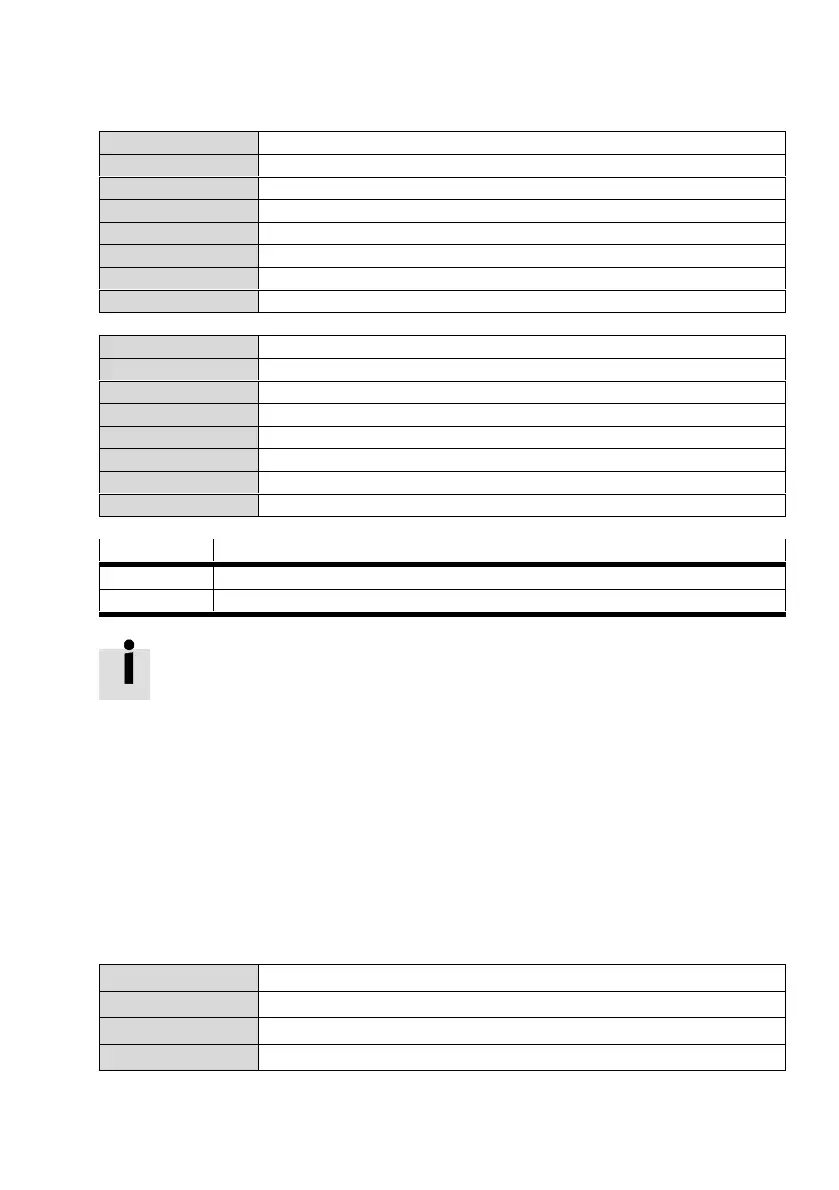
Sub-Index 01
h
Description ip_data_position
Data Type INT32
Access rw
PDO mapping yes
Units position units
Value Range –
Default Value –
Sub-Index 02
h
Description ip_data_controlword
Data Type UINT8
Access rw
PDO mapping yes
Units –
Value Range 0, 1
Default Value 0
Value ip_data_controlword
0 Absolute position
1 Relative distance
The internal data transfer takes place with write access to sub-index 1. If sub-index 2
should also be used, it must be written before sub-index 1.
Object 60C2
h
: interpolation_time_period
The synchronisation interval can be set via the object record interpolation_time_period. Via
ip_time_index, the unit (ms or 1/10 ms) of the interval is established, which is parametrised via
ip_time_units. To achieve synchronisation, the complete controller cascade (current, speed and
position controller) is synchronised up to the external pulse. A change in the synchronisation interval is
therefore effective only after a reset. Therefore, if the interpolation interval is to be revised via the CAN
bus, the parameter set must be saved ( chapter 5.1) and a reset performed ( chapter 6), so that
the new synchronisation interval becomes effective. The synchronisation interval must be maintained
exactly.
Index 60C2
h
Name interpolation_time_period
Object Code RECORD
No. of Elements 2

 Loading...
Loading...










