Instruction Manual
D103412X012
Detailed Setup—PID Function Block
July 2013
134
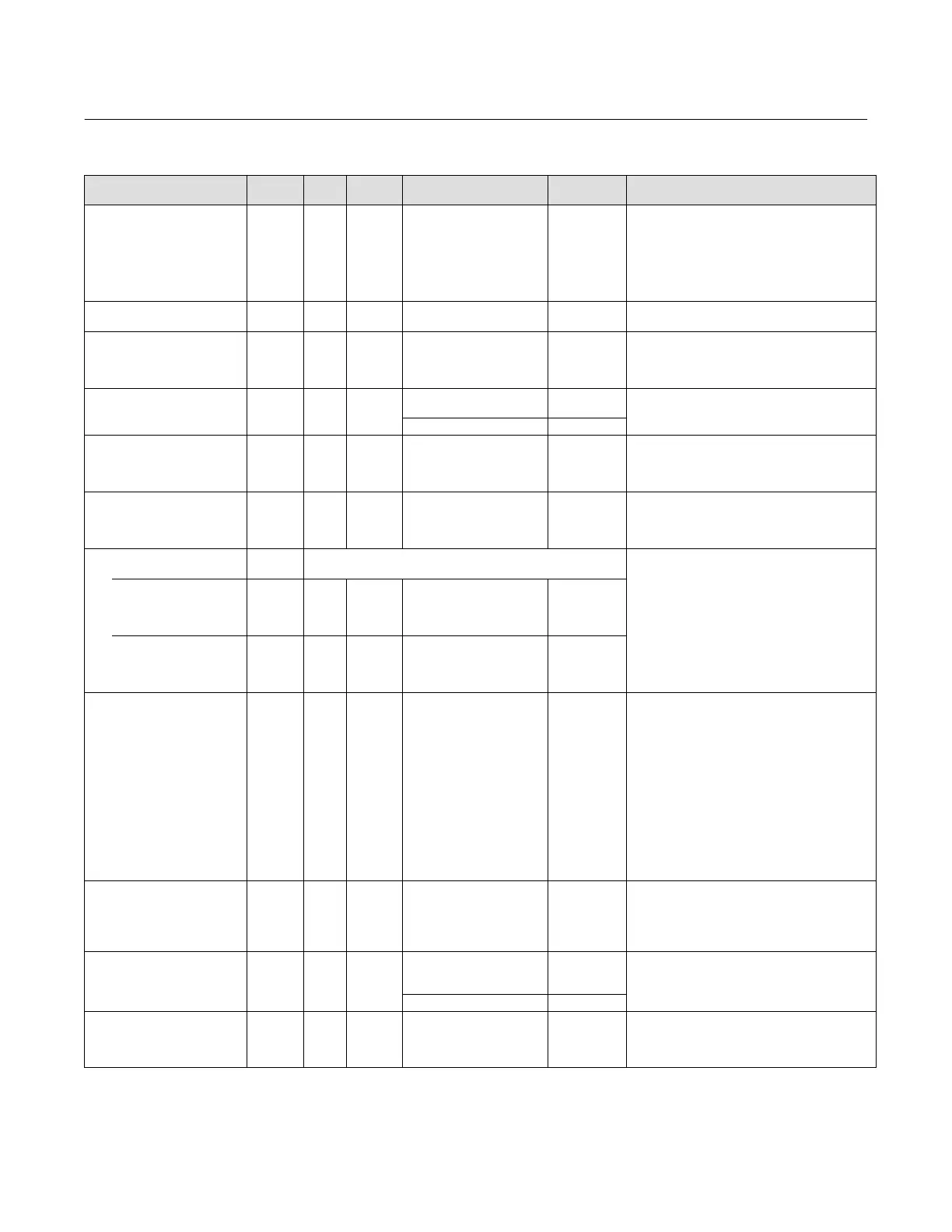
Table 4‐32. PID Function Block System Parameters Definitions (Continued)
DescriptionInitial ValueRange
Block
Mode
RO /
RW
Index
Number
Label
PARAMETER_NAME
Block Error
BLOCK_ERR
6 RO N/A
Defined Bits
1: Block Configuration Error
4: Local Override
7: Input Failure/ Bad PV status
14: Power‐up
15: Out‐of‐Service
Dynamic
Data Type: Bit String
0 = inactive
1 = active
This parameter reflects the error status associated
with the hardware or software components
associated with a block. It is a bit string so that
multiple errors may be shown.
Process Value
PV
7 RO N/A Dynamic
Data Type: DS‐65
The process variable used in block execution.
Setpoint
SP
8
OOS
MAN
AUTO
PV_SCALE +/- 10% Dynamic
Data Type: DS‐65
The target block setpoint value. It is the result of
setpoint limiting and setpoint rate of change
limiting.
Output
OUT
9
MAN
OOS
Status
OUT_SCALE +/- 10%
Dynamic
DS‐65
The block output value and status.
Value
Process Value Scale
PV_SCALE
10 OOS
EU at 100%
EU at 0%
Units index
Decimal
Point
100
0
%
2
Data Type: DS‐68
The high and low scale values, engineering units
code, and number of digits to the right of the
decimal point associated with PV.
Output Scale
OUT_SCALE
11 OOS
EU at 100%
EU at 0%t
Units index
Decimal
Point
100
0
%
2
Data Type: DS‐68
The high and low scale values, engineering units
code, and number of digits to the right of the
decimal point associated with OUT.
Grant Deny
GRANT_DENY
12
Data Type: DS‐70
Options for controlling access of host computers
and local control panels to operating, tuning, and
alarm parameters of the block. Not used by the
device.
GRANT: 0=N/A, 1=granted
DENY: 0 = N/A, 1= denied
GRANT 12.1 ALL
0: Program
1: Tune
2: Alarm
3: Local
All bits: 0
DENY 12.2 ALL
0: Program
1: Tune
2: Alarm
3: Local
All bits: 0
Control Options
CONTROL_OPTS
13 OOS
0: Bypass Enable
1: SP tracks PV in MAN
2: SP tracks PV in ROUT
3: SP tracks PV in LO or MAN
4: SP tracks RCAS or CAS in
IMAN, LO, MAN or ROUT
5: Direct Acting
7: Track Enable
8: Track in Manual
9: Use PV for BKCAL_OUT
10: Act on IR
12: Restrict SP to limits in
Cas and RCas
13: No output limits in MAN
All bits: 0
Data Type: Bit String
0=disable
1=enable
Allows you to specify control strategy options.
Status Options
STATUS_OPTS
14 OOS
0: IFS (Initiate Fault State)
if BAD IN
1: IFS if BAD CAS_IN
2: Use Uncertain as Good
5: Target to MAN if BAD IN
All bits: 0
Data Type: Bit String
0=disable
1=enable
Allows you to select options for status handling
and processing.
Input
IN
15 ALL
Status
BAD:
NC:
const
Data Type: DS‐65
The primary input value of the block.
Value 0
Process Value Filter Time
PV_FTIME
16 ALL Positive 0
Data Type: Float
The time constant of the first-order PV filter. It is
the time, in seconds, required for a 63 percent
change in the IN value.
-Continued-
 Loading...
Loading...









