Instruction Manual
D103412X012
Detailed Setup—PID Function Block
July 2013
135
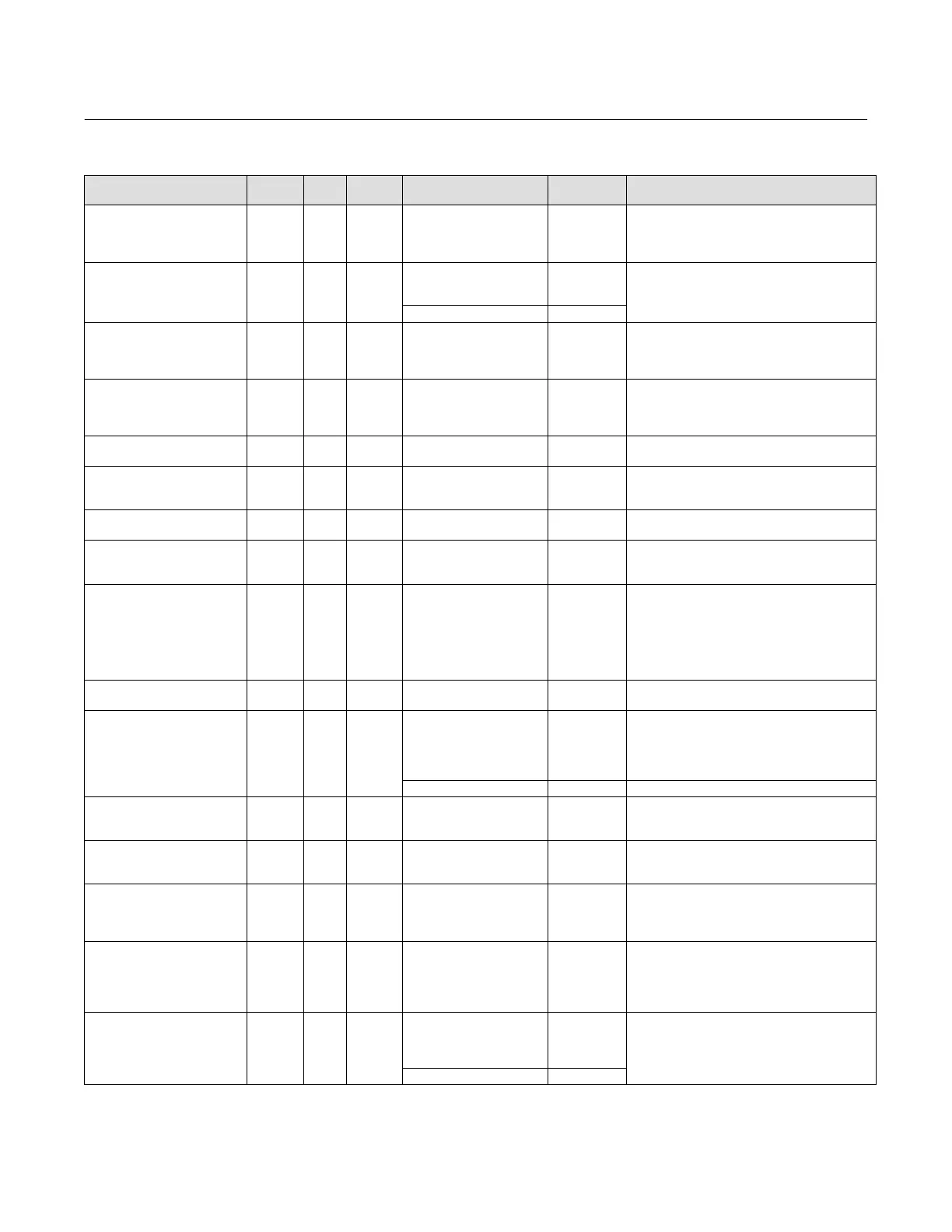
Table 4‐32. PID Function Block System Parameters Definitions (Continued)
DescriptionInitial ValueRange
Block
Mode
RO /
RW
Index
Number
Label
PARAMETER_NAME
Bypass
BYPASS
17
MAN
OOS
1=Off
2=On
0=undefined
Data Type: Enum
Used to override the calculation of the block.
When enabled, the SP is sent directly to the
output.
Cascade Input
CAS_IN
18 ALL
Status
BAD
NC:
const
Data Type: DS‐65
The setpoint value from another block.
Value 0
Setpoint Rate Down
SP_RATE_DN
19 ALL Positive + INF
Data Type: Float
Ramp rate for downward SP changes. When the
ramp rate is set to zero, the SP is used
immediately. PV per second
Setpoint Rate UP
SP_RATE_UP
20 ALL Positive + INF
Data Type: Float
Ramp rate for upward SP changes. When the ramp
rate is set to zero, the SP is used immediately. PV
per second
Setpoint High Limit
SP_HI_LIM
21 ALL
PV Scale +/- 10%, must be
greater than SP_LO_LIM
100
Data Type: Float
The highest SP value allowed.
Setpoint Low Limit
SP_LO_LIM
22 ALL
PV Scale
+/- 10%, must be less than
SP_HI_LIM
0
Data Type: Float
The lowest SP value allowed.
Gain
GAIN
23 ALL greater than 0 1
Data Type: Float
The proportional gain value.
Reset
RESET
24 ALL Positive + INF
Data Type: Float
The integral action time constant. Seconds per
repeat
Balance Time
BAL_TIME
25 ALL Positive 0
Data Type: Float
The specified time, in seconds, for the internal
working value of bias to return to the operator set
bias. Also used to specify the time constant at
which the integral term will move to obtain
balance when the output is limited and the mode is
AUTO, CAS, or RCAS.
Rate
RATE
26 ALL Positive 0
Data Type: Float
The derivative action time constant, in seconds.
Back Calculation Input
BKCAL_IN
27 ALL
Status
BAD:
NC:
const
Data Type: DS‐65
The analog input value and status from another
block's BKCAL_OUT output that is used for
backward output tracking for bumpless transfer
and to pass limit status.
Value 0
Output High Limit
OUT_HI_LIM
28 ALL OUT_SCALE +/- 10% 100
Data Type: Float
Limits the maximum output value for modes other
than manual.
Output Low Limit
OUT_LO_LIM
29 ALL OUT_SCALE +/- 10% 0
Data Type: Float
Limits the minimum output value for modes other
than manual.
Back Calculation Hysteresis
BKCAL_HYS
30 ALL 0 to 50% 0.50%
Data Type: Float
The amount the output value must change away
from the its output limit before limit status is
turned off.
Back Calculation Output
BKCAL_OUT
31 RO N/A Dynamic
Data Type: DS‐65
The value and status required by the BKCAL_IN
input of another block to prevent reset windup and
to provide bumpless transfer of closed loop
control.
Remote Cascade Input
RCAS_IN
32 ALL
Status
BAD:
NoCom:
NoVal:
const
Data Type: DS‐65
Target setpoint and status that is provided by a
supervisory host. Used when mode is RCAS.
Value 0 Trk
-Continued-
 Loading...
Loading...









