44
<Model Basic Setting Procedure>
&RQÀUPWKDWWKHUDWHRIWKHVORZHVWSRVLWLRQRI
KHVWLFNLVLQLWLDOVHWWLQJ
HVXUHWKDWZKHQVHWWRKLJKVLGHWKHFXUYH
FRQGLWLRQGRHVQRWH[FHHG
Example of pitch curve setting:
LWFKFXUYHRIHDFKFRQGLWLRQZLWK
0DNHWKHSLWFKDWKRYHULQ
ZLWKWKHVWLFNSRVLWLRQDW
Stability at hovering may be connected to the throttle curve.
LVOHVVWKDQLGOHXS
3LWFKDQJOHVHWWLQJH[DPSOH
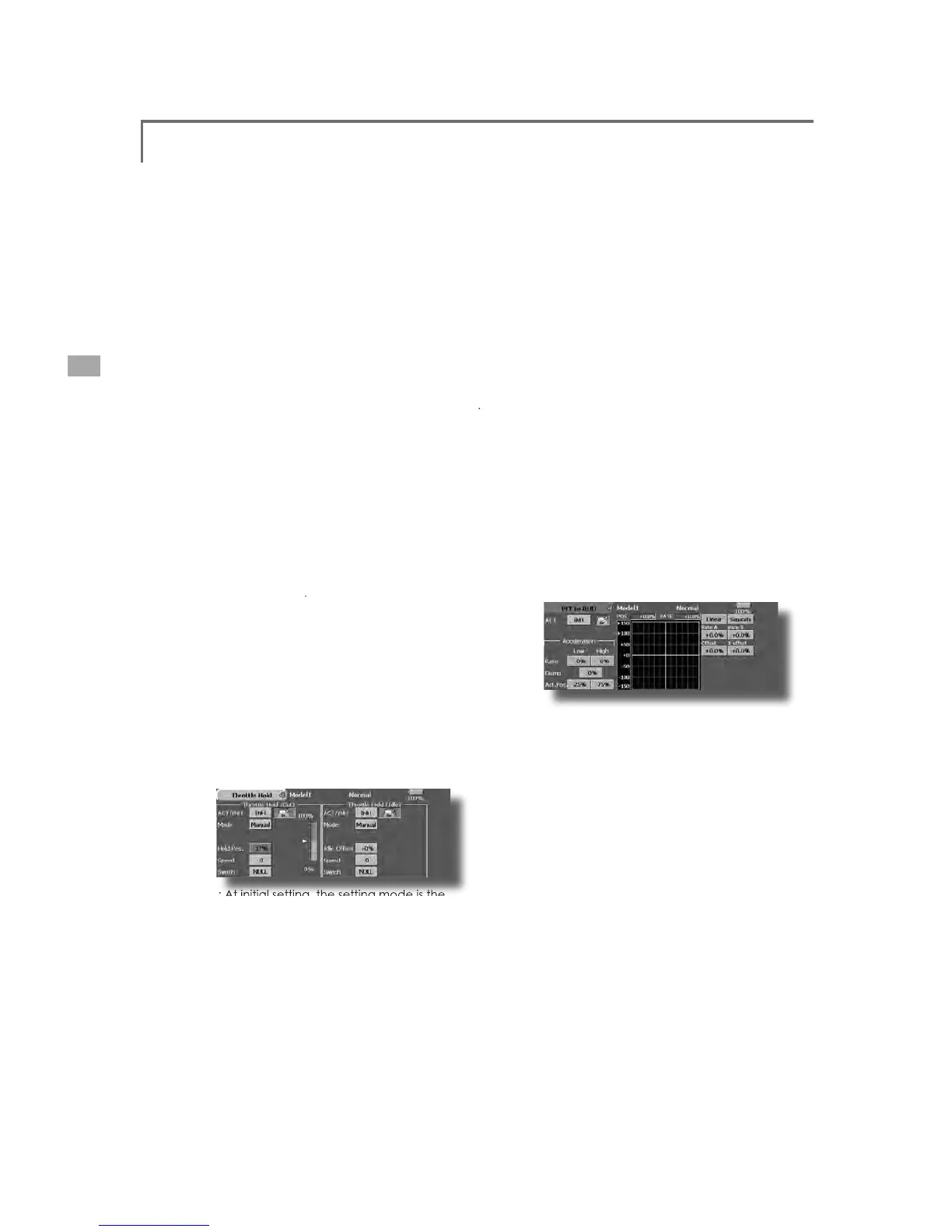
Menu and switch to the throttle hold condition with
1RWH$WLQLWLDOVHWWLQJWKHVHWWLQJPRGHLVWKH
RQGLWLRQVVZLWFKWRWKHVLQJOHPRGHEHIRUHVHWWLQJ
WRWKHVWDWHZKLFKDFWLYDWHVWKH
KHWKURWWOHKROGIXQFWLRQDOORZVVHWWLQ
RIWKHIXQFWLRQÀ[HGDWWKHLGOH
RQWKH$XWRPRGHFDQEHVHW
:KHQ\RXZDQWWRDG
and speed of the main rotor during pitch operation.
A
hold gyro like those shown below, do not use Pitch
D*<*<*<RURWKH
RQ
V\PSWRPVDQGWKHJ\URZ
all the Pitch to RUD mixin
WDWH7RXVHLWVHWLWWRWKH21VWDWH
urve setting of up to 17 points is possible.
However,
RGH,QWKLVPRGHWKHVDPHFRQWHQWVDUHVHWDWLQ
RXZDQWWRVHWWKHVHOHFWHG
RQGLWLRQRQO\VZLWFKWRWKHVLQ
curve of each condition with the
condition select switch.
KHWKURWWOHKROGFXUYHLVXVHGZKHQSHUIRUPLQ