68
<Linkage Menu>
ŏ5HWXUQWR/LQND
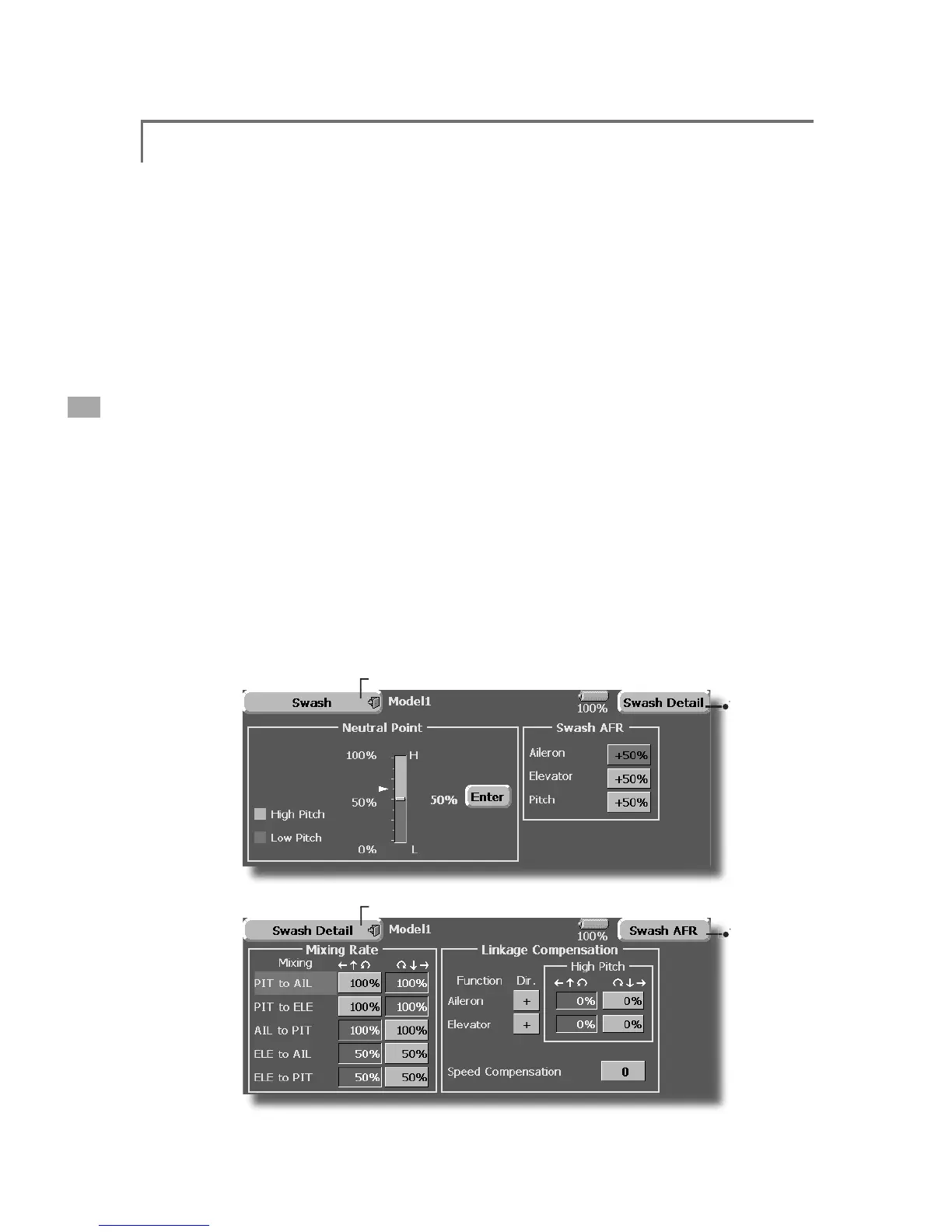
7RXFKWKH>6ZDVK@EXWWRQLQWKH /LQND
VFUHHQVKRZQEHORZ
Swash
VVZDVKVHWXSVFUHHQGRHVQRWDSSHDU
es, if the servo horn deviates from
he perpendicular position at neutral, the linkage
compensat
. This neutral point settin
inkage compensation neutral position. However,
ensation function on the swash details screen
and does not affect the neutral
, the initial value is used.)
This mixing rate is used for correction so tha
ompensation mixing is shown below
*PIT->AIL/PIT->ELE/AIL->PIT/ELE->AIL/ELE->PIT
*Use the correspondin
This compensation mixing is used to correct fo
e
operating speed of the aileron and pitch servos at