• BZ Command:
Issue the BZ command to lock the motor into a phase. Note that this will cause up to ½ a magnetic cycle of
motion. Be sure to use a high enough value with BZ to ensure the motor is locked into phase properly.
• BX Command:
Issue the BX command. The BX command utilizes a minimal movement algorithm in order to determine the
correct commutation of the motor.
Setting Amplifier Gain and Current Loop Gain
The AG command will set the amplifier gain (Amps/Volt), and the AU command will set the current loop gain for
the AMP-43740. The current loop gain will need to be set based upon the bus voltage and inductance of the motor
and is critical in providing the best possible performance of the system.
AG command:
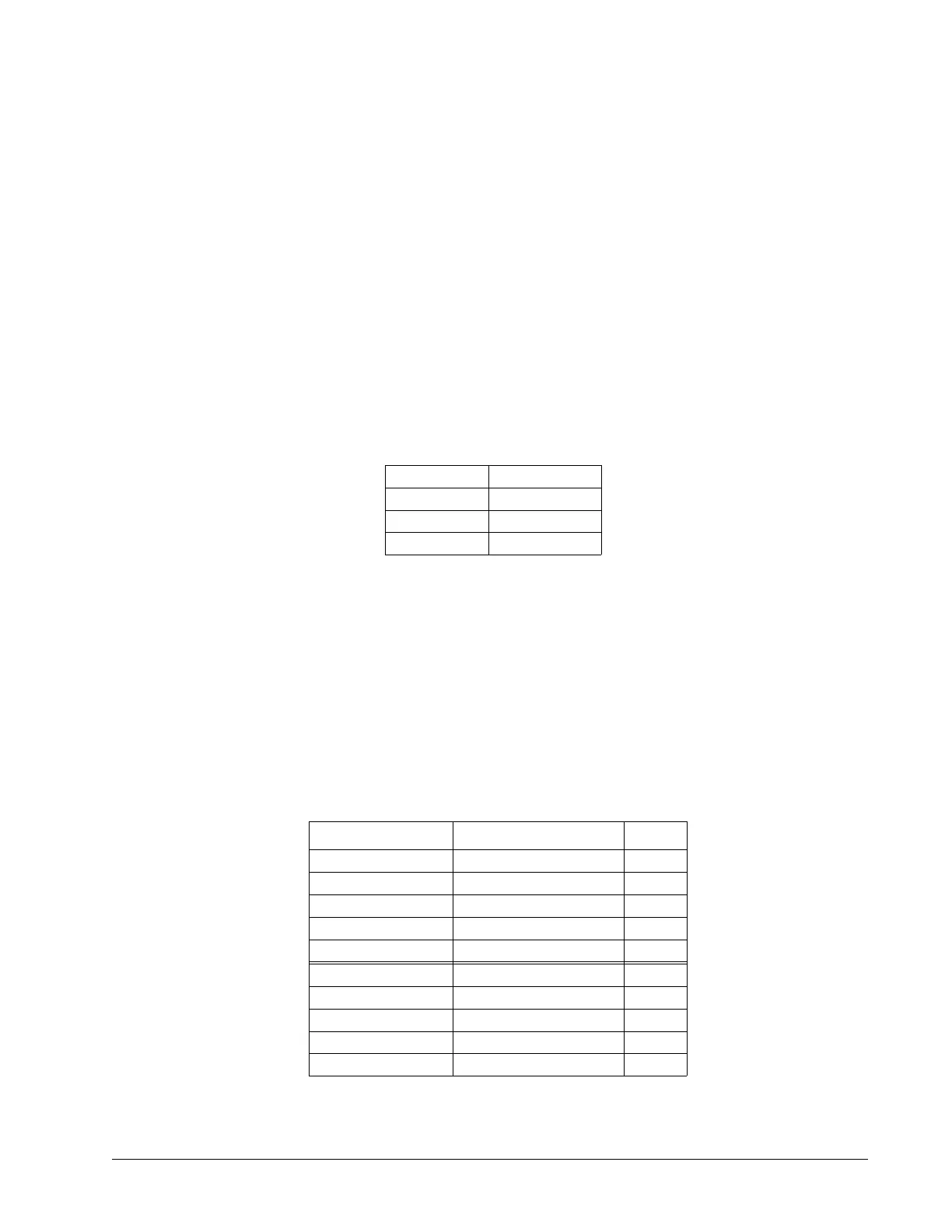
The AMP-43740 has 3 amplifier gain settings. The gain is set with the AG command as shown in Table A6.2 for AG
n=m:
Table A6.2: Amplifier Gain Settings for AMP-43740
The axis must be in a motor off (MO) state prior to execution of the AG command. With an amplifier gain of 2
(3.2A/V) the maximum motor command output is limited to 5V (TL of 5).
AU command:
Proper configuration of the AU command is essential to optimum operation of the AMP-43740. This command sets
the gain for the current loop on the amplifier. The goal is to set the gain as high as possible without causing the
current loop to go unstable. In most cases AU 0 should not be used. Table A6.3 indicates the recommended
AUn=m settings for 24 and 48 VDC power supplies.
To set the AU command, put the axis in a motor off (MO) state, set the preferred AG setting, and then set the AU
setting. To verify that the current loop is stable, set the PID's to 0 (KP, KD and KI) and then enable the axis (SH). An
unstable current loop will result in oscillations of the motor or a high frequency “buzz” from the motor.
Vsupply VDC Inductance L (mH) m =
Table A6.3: Amplifier Current Loop Gain Settings
A6 – AMP-43740 (-D3740) ▫ 244 DMC-40x0 User Manual

 Loading...
Loading...

