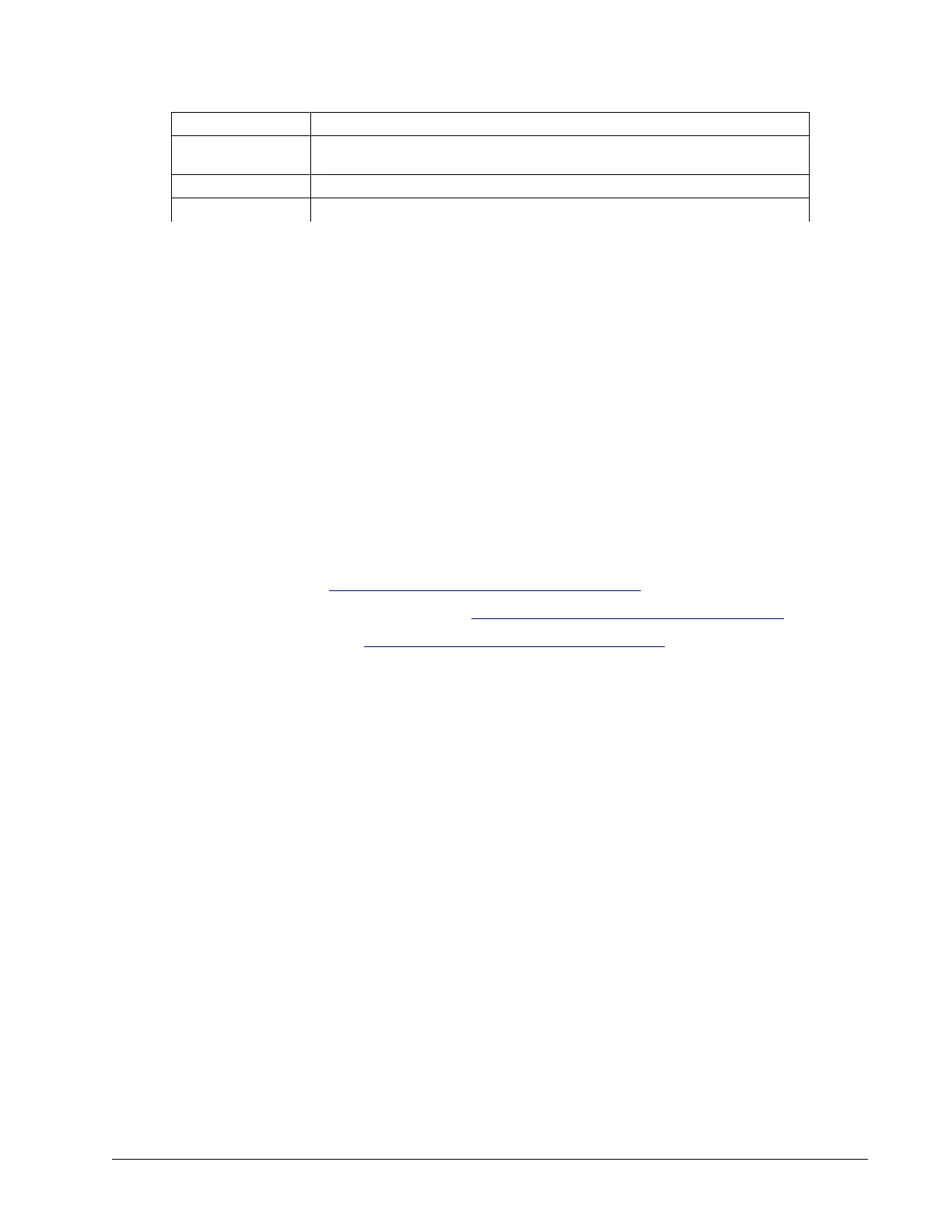
Command Description
MT
The motor type command configures what type of control method to use
(switches axis between motor command or step/dir options)
TL
Servo only. Limits the motor command line's continuous output in Volts
TK
Servo only. Limits the motor command line's peak output in Volts
Table 2.16: Brief listing of most commonly used configuration commands for the motor command and step/dir lines
Step F. If using a servo motor, continue to Step 10. Tune the Servo System, pg 32. If using a stepper motor, skip
to Step G.
Step G. Enable and use your motor
A SH will enable the external amplifier, once enabled, you can send DMC motion commands to move the
motor, see Chapter 6 Programming Motion, pg 71 for details.
Step 10. Tune the Servo System
Adjusting the tuning parameters is required when using servo motors. A given set of default PID's is provided, but
are not optimized and should not be used in practice.
For the theory of operation and a full explanation of all the PID and other filter parameters, see Chapter 10 Theory
of Operation, pg 170.
For additional tuning resources and step-by-step tuning guides, see the following:
Application Notes
Manual Tuning Methods: http://www.galil.com/download/application-note/note3413.pdf
Manual Tuning using the Velocity Zone method: http://www.galil.com/download/application-note/note5491.pdf
Autotuning Tools in Galil Suite: http://www.galil.com/download/manual/galilsuite/tuner.html
Chapter 2 Getting Started ▫ 32 DMC-40x0 User Manual

 Loading...
Loading...

