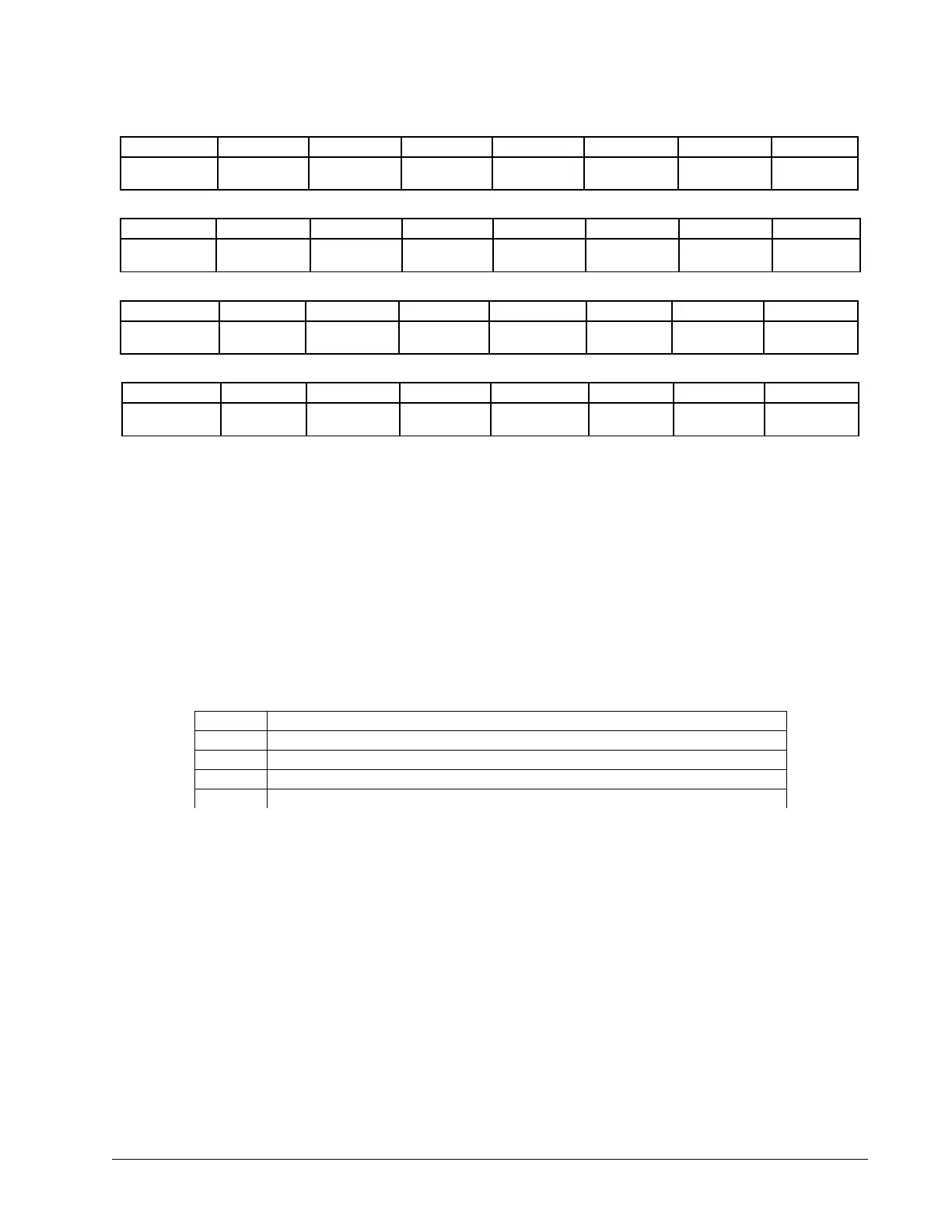
Amplifier Status (4 Bytes)
BIT 31 BIT 30 BIT 29 BIT 28 BIT 27 BIT 26 BIT 25 BIT 24
N/A N/A N/A N/A N/A N/A
ELO Active
(Axis E-H)
ELO Active
(Axis A-D)
BIT 23 BIT 22 BIT 21 BIT 20 BIT 19 BIT 18 BIT 17 BIT 16
Peak Current
H-axis
Peak Current
G-axis
Peak Current
F-axis
Peak Current
E-axis
Peak Current
D-axis
Peak Current
C-axis
Peak Current
B-axis
Peak current
A-axis
BIT 15 BIT 14 BIT 13 BIT 12 BIT 11 BIT 10 BIT 9 BIT 8
Hall Error
H-axis
Hall Error
G-axis
Hall Error
F-axis
Hall Error
E-axis
Hall Error
D-axis
Hall Error
C-axis
Hall Error
B-axis
Hall Error
A-axis
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Under Voltage
Axis (E-H)
Over Temp.
Axis (E-H)
Over Voltage
Axis (E-H)
Over Current
Axis (E-H)
Under Voltage
Axis (A-D)
Over Temp.
Axis (A-D)
Over Voltage
Axis (A-D)
Over Current
Axis (A-D)
Notes Regarding Velocity and Torque Information
The velocity information that is returned in the data record is 64 times larger than the value returned when using
the command TV (Tell Velocity). See command reference for more information about TV.
The Torque information is represented as a number in the range of ±32767. Maximum negative torque is -32767.
Maximum positive torque is 32767. Zero torque is 0.
QZ Command
The QZ command can be very useful when using the QR command, since it provides information about the
controller and the data record. The QZ command returns the following 4 bytes of information.
BYTE # INFORMATION
0 Number of axes present
1 number of bytes in general block of data record
2 number of bytes in coordinate plane block of data record
3 Number of Bytes in each axis block of data record
Chapter 4 Software Tools and Communication ▫ 63 DMC-40x0 User Manual

 Loading...
Loading...

