6-22 M60 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
METERING CHAPTER 6: ACTUAL VALUES
6
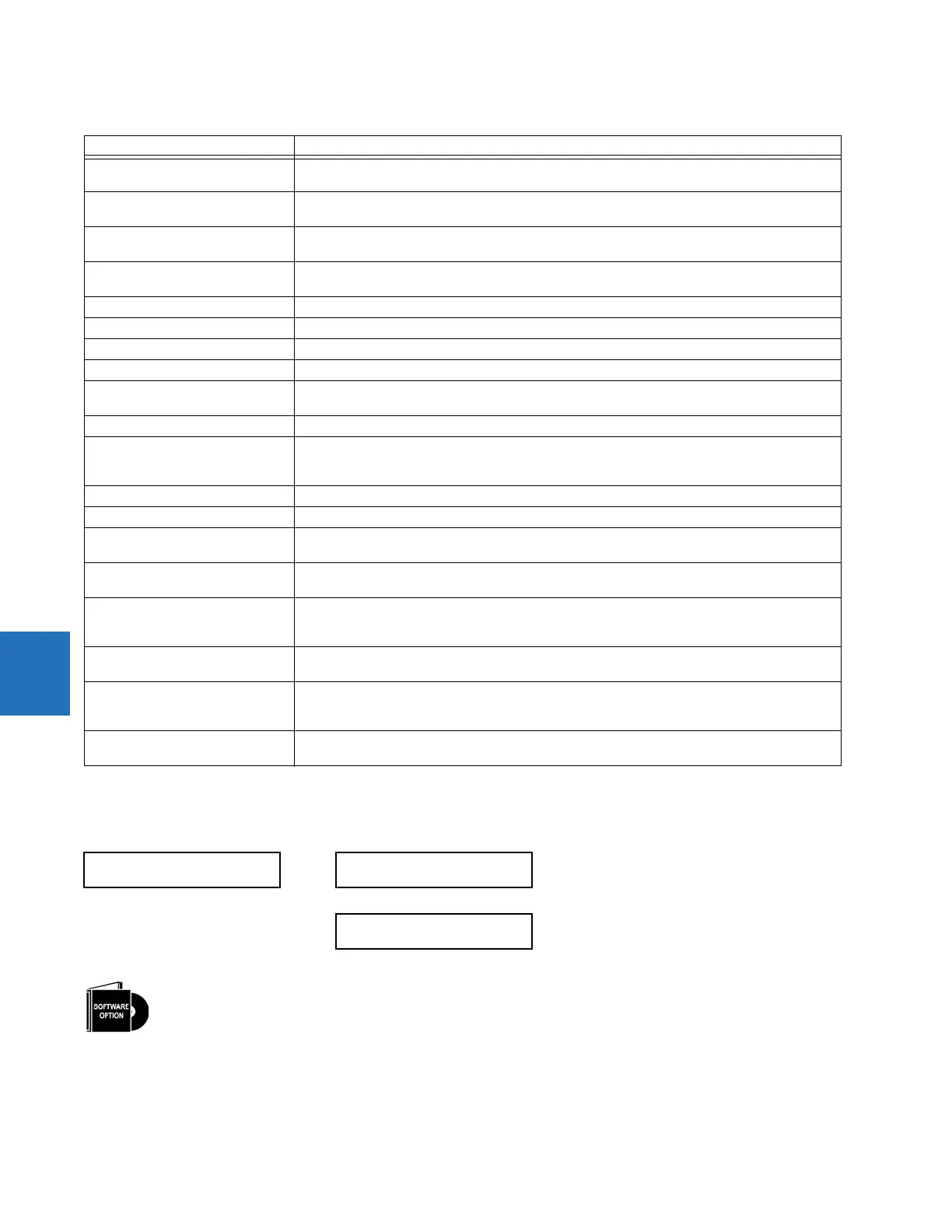
Table 6-2: FlexElement base units
6.4.9 RxGOOSE analogs
ACTUAL VALUES METERING RxGOOSE Analogs
The RxGOOSE Analog values display in this menu. The RxGOOSE Analog values are received via IEC 61850 GOOSE
messages sent from other devices.
Base unit Description
BREAKER ACC ARCING AMPS
(Brk X Acc Arc Amp A, B, and C)
BASE = 2000 kA
2
× cycle
BREAKER ARCING AMPS
(Brk X Arc Amp A, B, and C)
BASE = 1 kA
2
× cycle
CURRENT UNBALANCE
(Amp Unbalance)
BASE = 100%
DCmA BASE = maximum value of the DCMA INPUT MAX setting for the two transducers configured
under the +IN and –IN inputs.
FREQUENCY f
BASE
= 1 Hz
PHASE ANGLE ϕ
BASE
= 360 degrees (see the UR angle referencing convention)
POWER FACTOR PF
BASE
= 1.00
RTDs BASE = 100°C
SENSITIVE DIR POWER
(Sns Dir Power)
P
BASE
= maximum value of 3 × V
BASE
× I
BASE
for the +IN and –IN inputs of the sources configured
for the sensitive power directional element(s).
SOURCE CURRENT I
BASE
= maximum nominal primary RMS value of the +IN and –IN inputs
SOURCE ENERGY
(Positive and Negative Watthours,
Positive and Negative Varhours)
E
BASE
= 10000 MWh or MVAh, respectively
SOURCE POWER P
BASE
= maximum value of V
BASE
× I
BASE
for the +IN and –IN inputs
SOURCE VOLTAGE V
BASE
= maximum nominal primary RMS value of the +IN and –IN inputs
STATOR DIFFERENTIAL CURRENT
(Stator Diff Iar, Ibr, and Icr)
I
BASE
= maximum primary RMS value of the +IN and –IN inputs
(CT primary for source currents, and bus reference primary current for bus differential currents)
STATOR RESTRAINING CURRENT
(Stator Diff Iad, Ibd, and Icd)
I
BASE
= maximum primary RMS value of the +IN and –IN inputs
(CT primary for source currents, and bus reference primary current for bus differential currents)
THERMAL MODEL
(Model Capacity Used)
(Model Motor Unbalance)
BASE =100%
THERMAL MODEL
(Model Lockout Time)
BASE = 10 minutes
THERMAL MODEL
(Thermal Model Load)
(Biased Motor Load)
BASE = 1.00 pu of FLA
THERMAL MODEL
(Trip Time on Overload)
BASE = 10 seconds
RxGOOSE
Analogs
RxGOOSE Analog 1
0.000
RxGOOSE Analog 32
0.000
The M60 is provided with optional GOOSE communications capability. This feature is specified as a software
option at the time of ordering. See the Order Codes section of chapter 2 for details.