27
Operation manual finishbalancer sd-10 – 9412 158 Mode d’emploi finishbalancer sd-10 – 9412 158
Balancing
• After measurement position the motor reversing switch
to middle position (Fig. 16, Item 11)
• Approach the balancer once again to the tyre and press
hard against. As a result the wheel is carefully braked
down to standstill (Fig. 16).
• For unbalance correction rotate the wheel such that the
reflecting tape coincides with the position indicated (red
LED; in example of Fig. 12 and 15 – 9 o’clock position).
• In this position fit a balance weight of the amount deter-
mined (example: Fig. 15 – 25 g) directly perpendicular to
the wheel centre on the rim (Fig. 12).
• After correction perform a check run in the same way.
When balancing has been completed successfully, the
amount reading will be zero and the position indicator
LEDs flash in different positions (no clear signal is given).
• If a minor unbalance is read out, correct according to re-
adings (also see § 9. Correction of balancing).
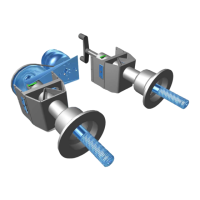
7.2 Balancing driven wheels
(static – vertical)
As already mentioned a second pick-up support and the addi-
tional opto-electronic unit are required for balancing driven
wheels (Fig. 17).
In general the unbalance of opposed driven wheels is
measured in a single measuring run in successive measure-
ments (wheel in front of balancer – opposite wheel).
When wheels are driven by the vehicle engine, that is in particu-
lar with steered driven wheels, unbalance measurement is
often subjected to alternate mechanical influences inherent in
the vehicle.
In order to overcome those influences during measurement,
the wheels should rotate at slightly different speeds so that the
selective measurement system of finishbalancer sd-10 filters
the unbalance signal of the wheel under test and reads out the
correct unbalance.
To obtain a speed difference and measure unbalance proceed
as follows.
• Set sensitivity – in general to 5,5 (see § 8.).
• Drive wheels by means of vehicle engine in highest gear
to 130 km/h, having a second operator for a help. Main-
tain the speed during measurement of both wheels, re-
ferring to a speedometer or a rev counter.
• Further accelerate the wheel in front of the balancer
using the drive pulley (see Fig. 14) until the respective
green LED (Fig. 18, Item 10) lights up. At this moment
the speed difference is obtained, ensuring favourable
measurement speed.
Equilibrage
• Après la mesure remettre l’inverseur moteur en position
médiane (Fig. 16, pos. 11).
• Approcher le finishbalancer de nouveau du pneu et pres-
ser la poulie fortement contre le pneu. Par conséquent,
la roue est arrêtée tout doucement jusqu’à l’immobilisa-
tion (Fig. 16).
• Pour l’équilibrage, tourner la roue jusqu’à ce que la
bande réfléchissante coïncide avec la position mesurée
(LED rouge; l’exemple Fig. 12 et 15 – position 9 h).
• Dans cette position de la roue, fixer sur la jante une
masse d’équilibrage du poids indiqué (dans l’exemple
Fig. 15 – 25 g) exactement perpendiculaire au centre de
la roue (Fig. 12)
• Après l’équilibrage faire une lancée d’essai comme dé-
crit ci-dessus. Si l’équilibrage est parfait, la lecture de la
grandeur sera de zéro et les LEDs indiquant la position
se mettent à clignoter (pas de signal clair).
• Si un moindre balourd est affiché, le corriger suivant les
nouvelles lectures (voir aussi § 9. Correction de l’équili-
brage).
7.2 Equilibrage des roues motrices
(statique – vertical)
Comme déjà mentionné plus haut, un deuxième chevalet de
mesure et le dispositif opto-électronique additionnel sont né-
cessaires pour l’équilibrage des roues motrices (Fig. 17).
En général, le balourd des roues motrices est déterminé dans
une seule lancée de mesure pendant des mesures successi-
ves des roues opposées (roue devant le finishbalancer – roue
opposée).
Lorsque les roues motrices, surtout les roues directrices, sont
entraînées par le moteur du véhicule, la mesure du balourd est
influencée par des facteurs mécaniques inhérents au véhicule.
Pour éliminer ces influences pendant la mesure, les roues de-
vraient tourner à des vitesses légèrement différentes, permet-
tant ainsi au système de mesure sélective du finishbalancer
sd-10 de filtrer uniquement le signal de balourd de la roue en
question et d’afficher les résultats corrects.
Pour obtenir une différence des vitesses et mesurer le balourd,
procéder comme suit.
• Régler la valeur de sensibilité – en général 5,5 (voir § 8.).
• Accélérer les roues par le moteur du véhicule en vitesse
supérieure jusqu’à 130 km/h et tenir cette vitesse cons-
tante pendant la mesure des deux roues (compteur de
vitesse, compte-tours).
• Puis accélérer la roue se trouvant devant le finishba-
lancer encore plus moyennant la poulie d’entraînement
(voir Fig. 14) jusqu’à ce que la LED verte relative s’al-
lume (Fig. 18, pos. 10). A ce moment, les roues tournent
à des vitesses différentes et une vitesse de mesure
avantageuse est atteinte.
 Loading...
Loading...