30
BA finishbalancer sd-10 – 9412 158
Auswuchten
7.3 Auswuchten mit Hilfe der Fernbedienung (Option),
nur Antriebsräder
Die Fernbedienung (Bild 4) enthält die komplette Anzeigeein-
heit aus Bild 11 und die Meßtasten 1 und 2.
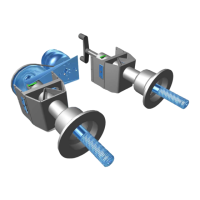
Der Anschluß erfolgt am Steckeranschluß des finishbalancers
(Bild 1, Pos. 8) oder am Stecker der Zusatz-Optoelektronik
(Bild 3, Pos. 1).
Die Funktionen der Meßtasten 1 und 2 sowie die Anzeige sind
die gleichen wie beim Hauptgerät und parallel abrufbar.
Damit ist es möglich, von der Fahrerposition aus (Räder antrei-
ben) die vertikale Unwucht beider Antriebsräder zu messen
und das Meßergebnis angezeigt zu bekommen.
Der Hauptschalter des finishbalancers muß eingeschaltet und
die Empfindlichkeit auf 5,5 bzw. auf den vorher ermittelten,
fahrzeugspezifischen Wert (siehe Punkt 8.) eingestellt sein.
Sind die Meßwerte von beiden Rädern ermittelt, ist es zweck-
mäßig, den Ausgleich zuerst am Rad vor der Zusatz-Optoelek-
tronik vorzunehmen und danach den Ausgleich am Rad vor
dem finishbalancer.
Bei Einmannbedienung vom Fahrersitz aus kann die Drehzahl-
differenz der Räder zwar beobachtet, aber nicht beeinflußt
(Nachtreiben, Abbremsen) werden. Ein rationelles, optimales
Auswuchten mit der Fernbedienung ist aus vorgenanntem
Grunde nicht bei jedem Fahrzeug durchführbar.
7.4 Auswuchten von Fahrzeugen mit Allradantrieb –
Pkw und Geländewagen
Auf dem Fahrzeugmarkt werden derzeit verschiedene Sy-
steme des Allradantriebes angeboten.
Es handelt sich um Fahrzeuge mit Permanentantrieb aller Ach-
sen (Räder), mit mechanisch oder elektronisch zuschaltbarem
Antrieb einer Achse (je nach fahrzeugspezifischer Gegeben-
heit Vorder- oder Hinterachse) oder mit einem sogenannten
Synchro-, Vario- oder Hydroantrieb. Bei den Letztgenannten
handelt es sich meist um elektronisch-hydraulische Steuer-
bzw. Antriebssysteme, welche sich jeweils automatisch der
momentanen Fahrsituation des Fahrzeuges anpassen.
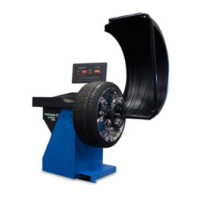
Um diese allradgetriebenen Fahrzeuge mit dem finishbalancer
sd-10 auszuwuchten, sind einige Kriterien zu beachten.
• Fahrzeuge mit permanent angetriebenen Achsen immer
auf vier Untersetzböcke, zweckmäßigerweise gleich auf
vier Meßböcke aufnehmen, da alle Räder angetrieben
sind und laufen.
• Fahrzeuge mit zuschaltbarem Achsantrieb nur dann auf
vier Untersetzböcke aufnehmen, wenn die Räder der zu-
schaltbaren Achse ausgewuchtet werden sollen.
Hier immer die Standardachse zuerst, dann die zu-
schaltbare Achse auswuchten.
 Loading...
Loading...