33
Operation manual finishbalancer sd-10 – 9412 158 Mode d’emploi finishbalancer sd-10 – 9412 158
Balancing
• For vehicles with non-mechanic four-wheel drive, which
often is a full-time system or responds to specific condi-
tions, proceed in the same way as for mechanical sys-
tems.
• For balancing of all four-wheel drive systems proceed in
the same way as for driven wheels (axle by axle).
Important
With all four-wheel drive vehicles refer to special instructions of
the car maker as to type and response of four-wheel drive and
differential.
There are four-wheel drives or systems where the wheels can-
not be driven by the drive pulley of the balancer, or where a
speed difference cannot be achieved (also seen note in § 7.2).
In most of the drive systems of that type the locks can be disen-
gaged for tests or maintenance work. At any rate refer to rel-
evant instructions of the car maker.
7.5 Balancing in horizontal direction –
primarily dynamic unbalance of non-driven front
wheels
If in spite of good static balance the steering wheel is apprecia-
bly vibrating while the wheels rotate, dynamic balancing is re-
quired. To this end the residual static unbalance has to be in-
ferior to 4 g (press long on the respective measurement key –
minor residual unbalance is read out).
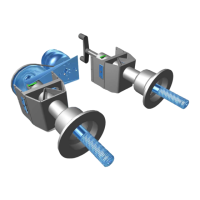
• For measurement mount the dynamic transducer (Fig. 5)
on the pick-up support and position properly (Fig. 20).
• Plug the transducer lead into the rear socket of the ter-
minal box of the pick-up support.
• Press the transducer against a wheel suspension el-
ement that is able to vibrate in horizontal direction (e g
brake anchor plate, caliper, splash shield, steering lever,
etc.).
The bellows of the transducer should be compressed to
nearly half of its original length (initial stress).
• Connect the transducer and check for proper perform-
ance (§ 6.2, key 4).
• Set sensitivity control to 5.5 on the scale (see § 8.).
• Drive wheel in counter-clockwise direction (see Fig. 14).
• Slightly return balancer (5 – 7 cm) and press constantly
on key 4 (Fig. 21).
Equilibrage
• Pour les véhicules à 4 roues motrices dont le système
est non mécanique (système très souvent en perma-
nence, ou répondant fonction des conditions de roule-
ment), procéder comme pour l’équilibrage des systèmes
à 4 roues motrices mécaniques.
• Pour l’équilibrage même, procéder comme pour les
roues motrices, mais bien sûr essieu par essieu.
Important
En ce qui concerne les véhicules à 4 roues motrices, observer
toujours les spécifications particulières du constructeur relati-
ves au type et à la réponse du système à 4 roues motrices et du
différentiel.
Il y a des systèmes qui ne permettent pas d’entraîner les roues
par la poulie du finishbalancer et/ou d’atteindre une différence
des vitesses des deux roues (voir aussi § 7.2 – Note).
Dans la plupart des systèmes, il y a des moyens de déclenche-
ment qui permettent de déclencher le système de blocage aux
fins d’un essai ou d’entretien. Dans ce cas aussi, observer les
spécifications du constructeur d’automobile.
7.5 Equilibrage en direction horizontal –
surtout du balourd dynamique des roues AV non
motrices
Si le volant vibre considérablement lors de la rotation de la roue
malgré son équilibrage statique parfait, il se recommande un
équilibrage dynamique. Ceci est possible si le balourd résiduel
après un équilibrage vertical est inférieur à 4 g (long actionne-
ment de la touche de mesure relative – un moindre balourd rési-
duel est affiché).
• Pour la mesure fixer le capteur dynamique (Fig. 5) sur le
chevalet et le positionner correctement (Fig. 20).
• Puis raccorder le capteur sur la prise à l’arrière de la
boîte à bornes du chevalet.
• Presser le capteur contre une partie de la suspension de
la roue qui est vibratoire en direction horizontale (par ex.
support du frein, étrier de frein, protecteur, levier de com-
mande de roue, etc.).
Le soufflet du capteur est ainsi comprimé à peu près á la
moitié de sa longueur initiale.
• Raccorder le capteur dynamique et contrôler son fonc-
tionnement (§ 6.2, touche 4).
• Régler le potentiomètre de sensibilité à 5,5 (voir § 8.)
• Entraîner la roue vers l’avant (voir Fig. 14).
• Reculer le finishbalancer un peu (5 – 7 cm) et appuyer
constamment sur la touche 4 (Fig. 21).
 Loading...
Loading...