7 PROGRAMMING A ROBOT WITH IRC
If your application requires long uninterrupted paths you can increase the limit. Note
that this can lead to a short calculation pause before starting a very long paths. More
information can be found on our wiki under the keyword "LookAhead".
https://wik i.cpr-robots .com/index.p hp/Motion_Smo
othing
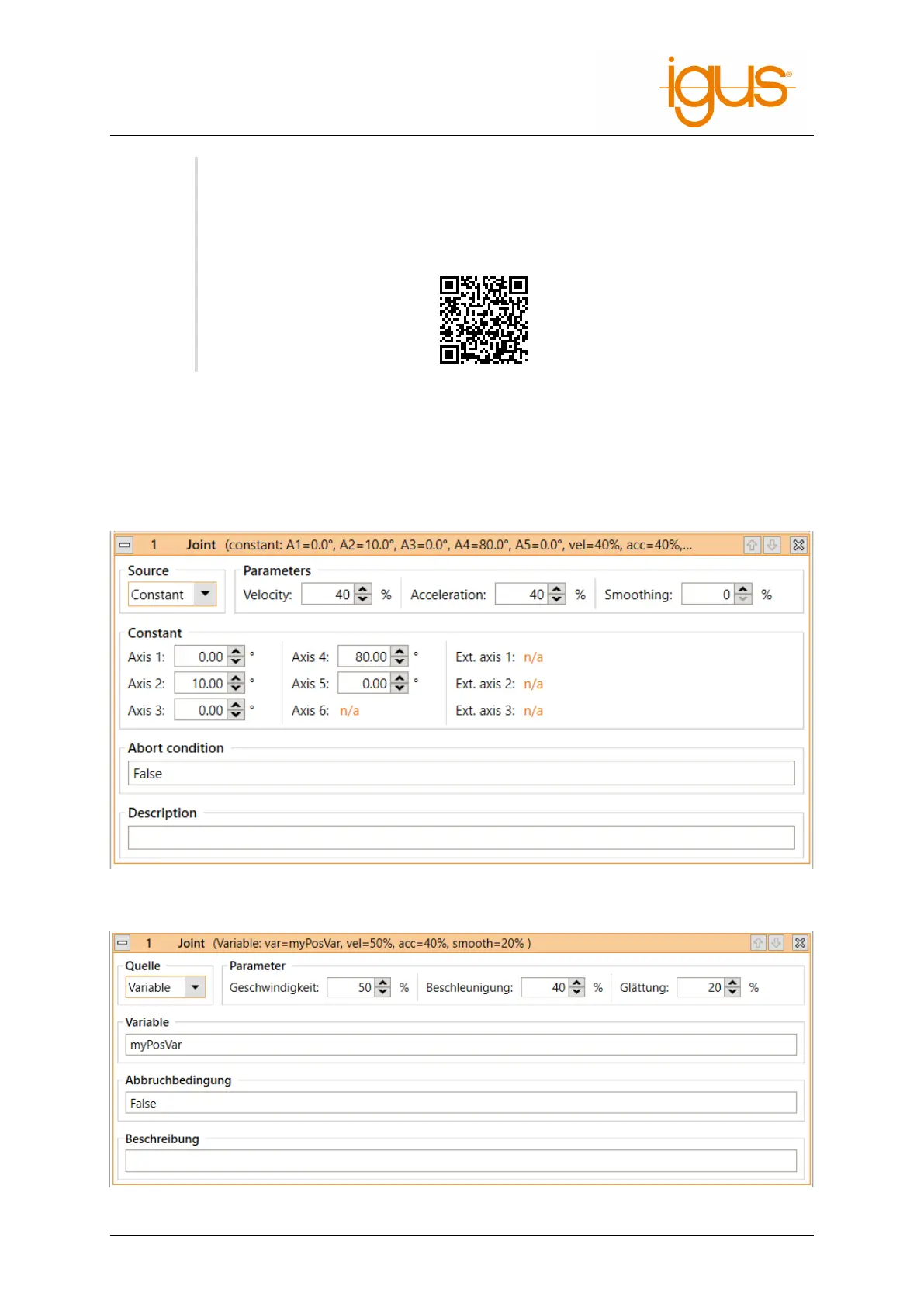
7.3.3 Joint Motion
The Joint command moves the robot to an (absolute) target position specified in axis coordinates.
The resulting movement of the TCP is usually a curve and not a straight line. The target position can
be specified in the following way (select the appropriate "source"):
• "Constant": The target position is a constant value for each axis.
• "Variable": The target position is taken from the position variable specified in "Variable".
©2022 igus® GmbH 25