8 HARDWARE CONFIGURATION
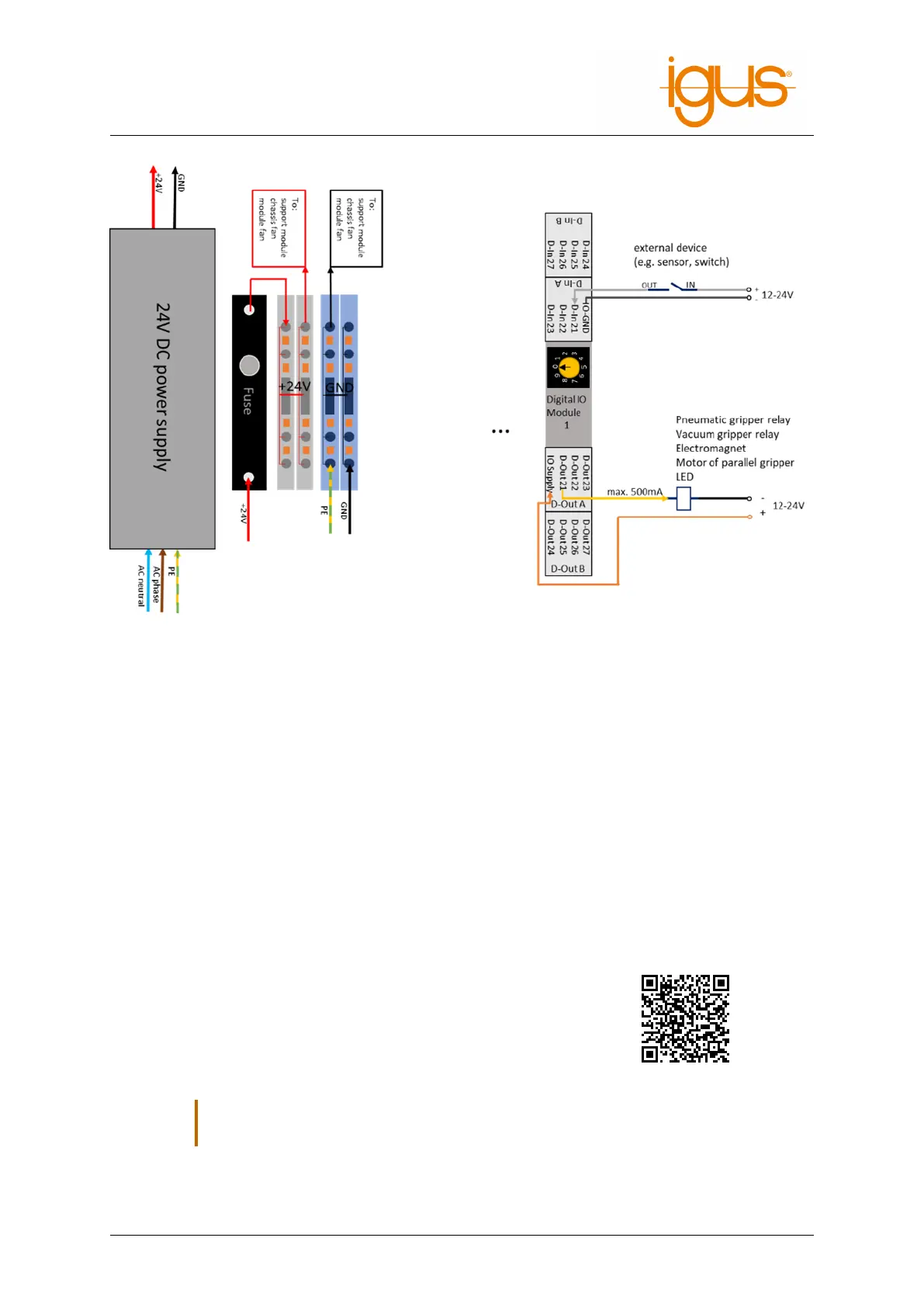
Figure 26: Example: Connection of a sensor and an motor
8.2 Motor Brake
Electromagnetic brakes are installed in the Rebel to prevent the axles from sagging. By applying a
voltage, the axles are released. Without voltage, they fall into the braking state by springs.
The brakes of the Rebel are controlled by the motor electronics, therefore no additional configuration
is necessary. The settings in the configuration area of iRC have no influence.
8.3 Motor control configuration
For the fine adjustment of the movement and the referencing, each axis module contains its own
configuration set. This can be retrieved and modified via the buttons "File" → "Download firmware
parameters" or "Upload firmware parameters". After downloading, the configuration set is created in
the installation directory of iRC under Data\Backup.
A detailed description of the parameters can be found at the following link:
https://wik i.cpr-robots .com/index.p hp/Firmware_P
arameter_Configuration
,
Change the firmware parameters only if you know what you are doing. Test the robot at
slow speed and observe the temperatures of the electronic modules and motors.
©2022 igus® GmbH 39