7 PROGRAMMING A ROBOT WITH IRC
The movement speed is indicated by "speed". It is measured in percent of the maximum allowed
motion speed for the respective robot axes.
The joint command can be called in the program editor under the menu items "Action" → "AxisMo-
tion" and "Action" → "VariableMotion" → "AxisMotion".
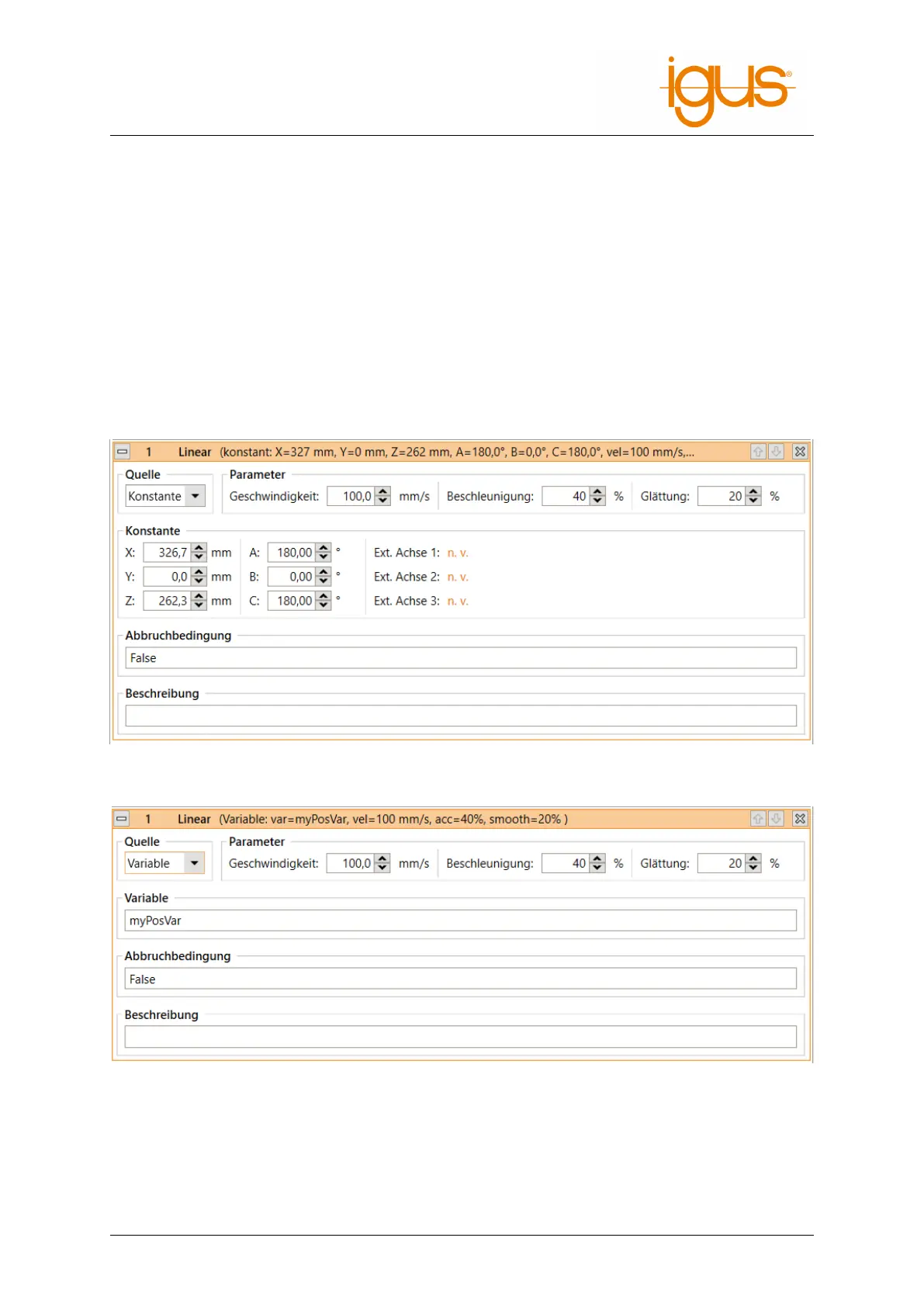
7.3.4 Linear Motion
The Linear command moves the robot to an (absolute) target position specified in cartesian coordi-
nates. The resulting movement of the TCP follows a straight line. The target position can be specified
as follows (select the corresponding "source"):
• "Constant": The target position is a constant given by Cartesian coordinates x, y, z and Euler
angles A, B, C as well as the positions of the external axes if supported by the current robot
kinematics.
• "Variable": The target position is taken from the position variable specified in "Variable".
The movement speed is specified by "Speed" in mm/s. If it exceeds the maximum allowed movement
speed of the robot, it will cause a kinematic error during execution. The Linear command can be
called in the program editor under "Action" → "Linear Motion" and "Action" → "Variable Motion" →
"Linear Motion".
©2022 igus® GmbH 26