Introduction to Digital Power Conversion
XMC4000/1000 Family
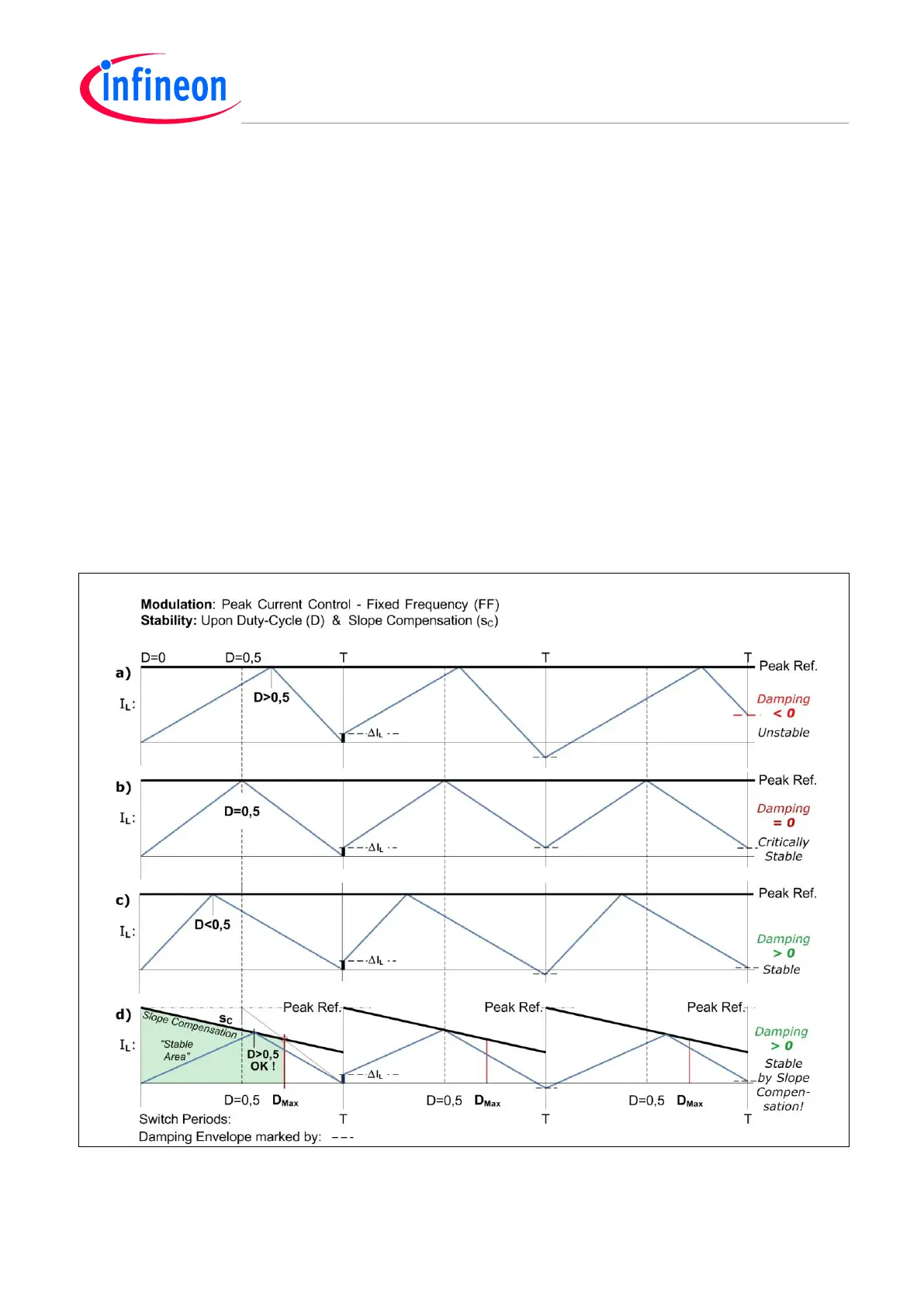
Modulation
Application Guide 64 V1.0, 2015-01
6.5 Slope Compensation
A Negative Characteristic with Positive Properties
Slope compensation should not be seen just as a design burden to remove sub-oscillations. There
are also advantages in using Slope Compensation. For example, inherent average current mode
control without using the CPU, or a custom closed loop response by a damping factor that is
adjustable via Slope Compensation.
6.5.1 A Necessity in Fixed Frequency PCC
By observing the reflections in a current mode control loop test, by a theoretical inductor current ∆I
L
Step Response, the test will disclose the conditions and the necessity for Slope Compensation; i.e.
when instability might occur and cause parasitic sub-oscillation, and if so, how it can be damped out.
The demo says that when the duty-cycle (D) exceeds 50% of the PWM cycle, then the system may be
unstable, unless there is a time variant reference level (ramp) as a peak current slope compensation
‘s
C
’.
The inductor current slopes are assumed to be constant, in cases a) through to d) in the diagram
below, by long time constants.
Figure 48 Modulation – Fixed Frequency PCC – Duty Cycle & Slope Compensation Criteria
Note: The duty-cycle-to-output transfer function in case d) is stable if D exceeds 0.5, due the slope s
C
.

 Loading...
Loading...
