Introduction to Digital Power Conversion
XMC4000/1000 Family
Modulation
Application Guide 67 V1.0, 2015-01
6.5.4 Slope Compensation Conditions – PCC
The slope compensation of the Peak Current has to comply with some boundary conditions. This
brings stability into the control loop, and there are parameters that improve properties such as a
damping effect or system variation endurance, supported in runtime by software in the long-term loop.
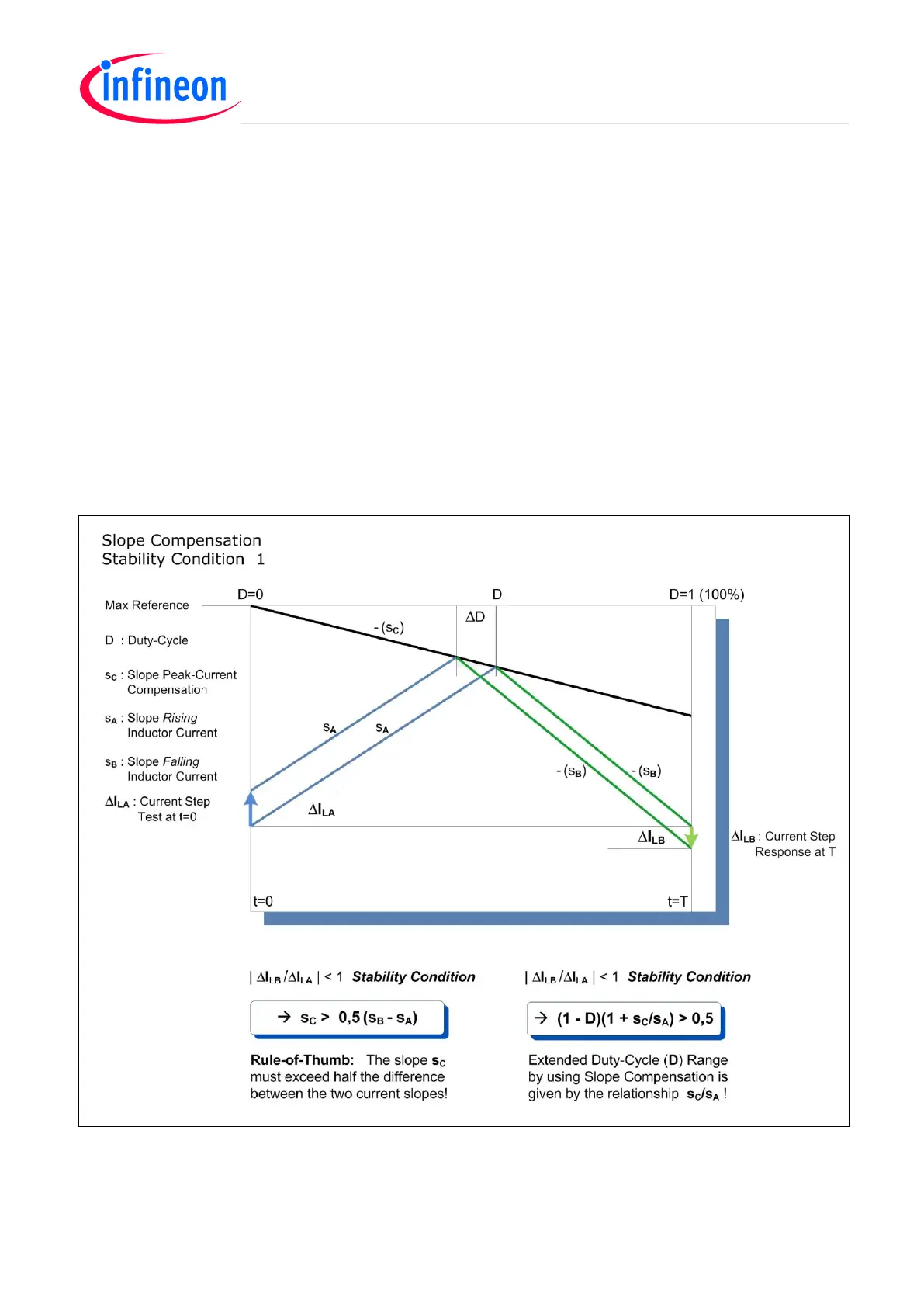
Slope Compensation: Stability Condition (1)
For PCC in CCM, the inductor current (I
L
) might run into sub-harmonic oscillations, depending on the
system conditions. One of those conditions is the duty-cycle D.
If D > 0.5 and there is no compensation ramp added in the control loop, it may cause instability (See
Figure 51).
The Peak Current Slope Compensation is introduced by a ramp s
C
, within each period T.
An inductor current with a rising slope s
A
will hit this ramp after D*T, and be falling with a slope s
B
during (1-D)*T.
Note: The relations between s
A
, s
B
, s
C
and (1-D)*T determine the inductor current (I
L
) stability
conditions.
Figure 51 PCC Slope Compensation – Stability Control Condition (1)

 Loading...
Loading...
