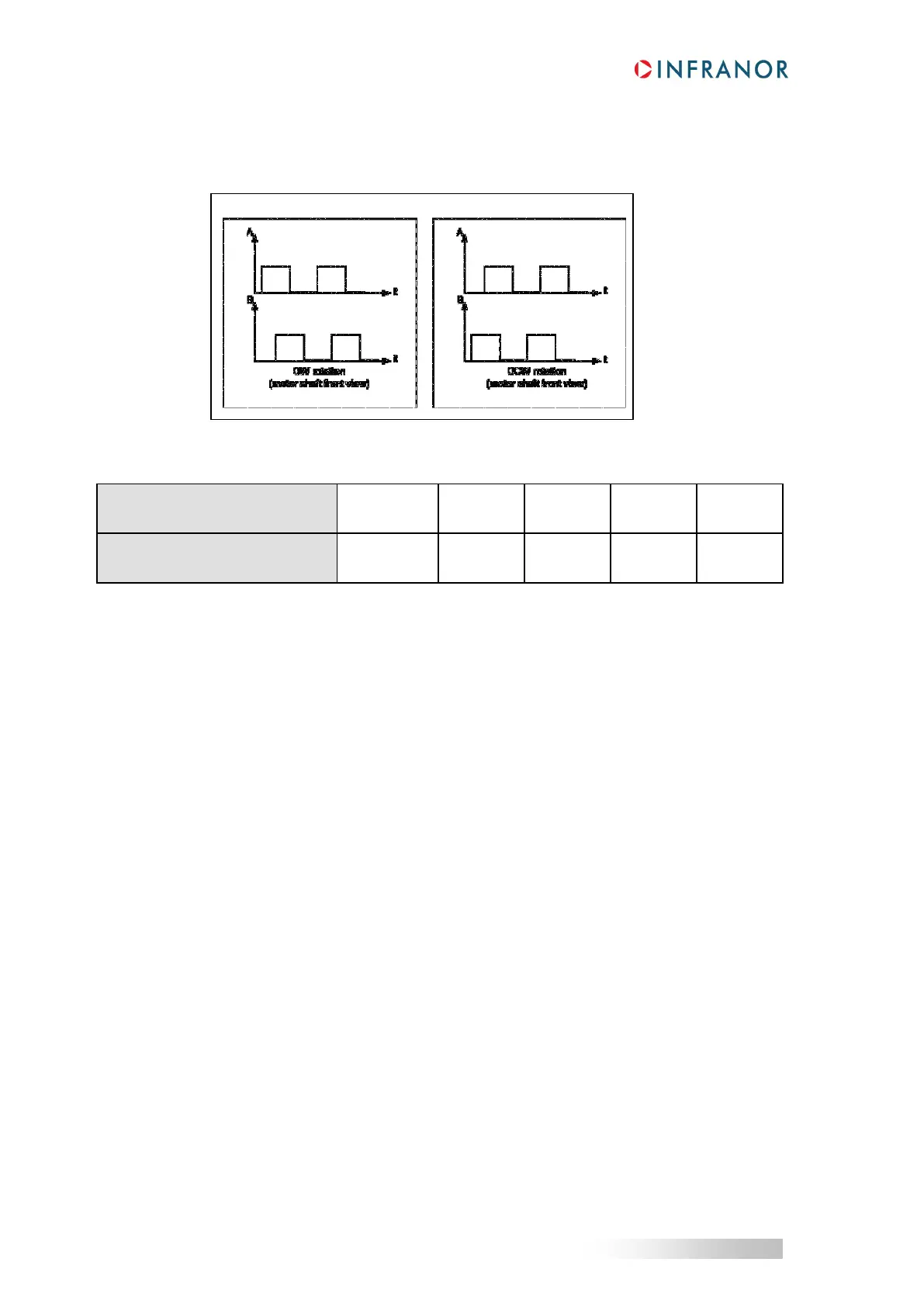
10 - INCREMENTAL ENCODER OUTPUTS
Two A and B channels in quadrature with one Z marker pulse per revolution allow closing the position loop via the
NC.
The Output encoder resolution parameter is chosen according to following table:
Maximum motor speed (rpm)
Encoder output resolution (ppr)
The resolution value defined in the Output encoder resolution parameter can be divided by 2, 4 or 8 by
selecting the Resolution division ratio parameter.
The Output encoder deadband parameter introduces a deadband at standstill around the current resolver
position in order to avoid oscillations of +/- 1 encoder edge on channels A and B. The value 4095 corresponds to
1/16 of the motor shaft revolution.
The Zero pulse origin shift parameter allows shifting the marker pulse position on channel Z with regard to the
resolver zero position. The value 32767 corresponds to one motor shaft revolution. The marker pulse width is
equal to 1/4 of the A and B channels period.
11 - USE OF THE "EXTERNAL CURRENT LIMITATION" INPUT
When Analog current limit reversal is selected in the Current limit menu, the maximum torque is available for a
10 V voltage applied on the I limit input and there is no torque in the motor for a 0 V voltage applied on the
I limit input.
The default configuration is Analog current limit reversal unselected. In this case, there is no torque limitation
for 0 V applied on the I limit input, so the maximum torque is available with the I limit input is not connected.

 Loading...
Loading...