Chapter 3 – Inputs-Outputs
XtrapulsPac Installation Guide
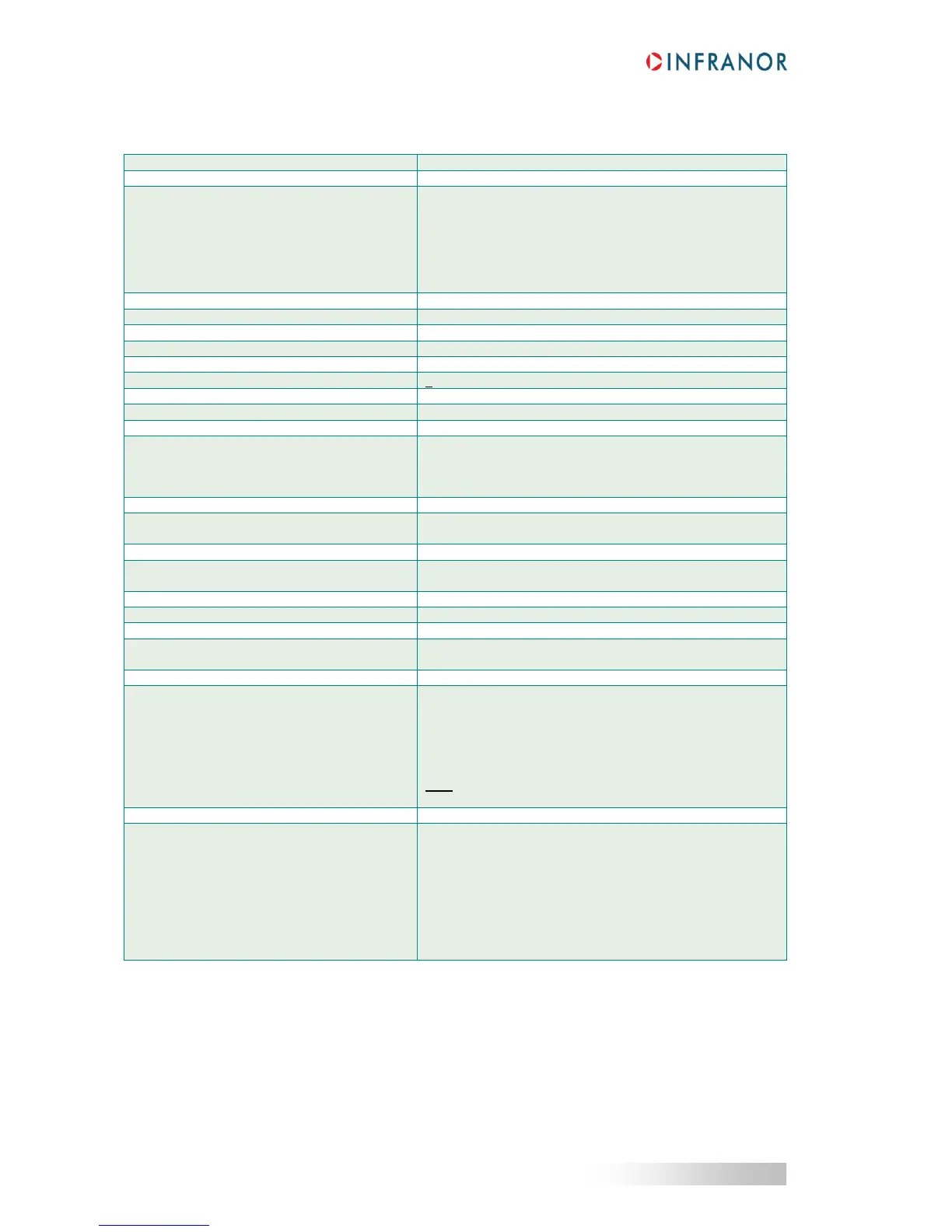
2.1.4 - Technical specifications
Servo loops: current, speed, position
Transmitter resolver (only Pac-ak and Pac-et versions)
Sin and Cos tracks
Incremental encoder (TTL or SinCos signals)
Incremental encoder + Hall Effect sensors
Absolute single-turn SinCos encoder
Absolute Hiperface® encoder
Absolute Hiperface DSL® encoder (Pac-ed version only)
+10 V (resolution: 12 bit)
0 to +10 V (resolution: 12 bit)
Speed and position regulators
Anti-wind-up system of the integrator
Anti-resonance filter
Adjustable digital gains
Selectable cut-off frequency for 45° phase shift:
50 Hz (low), 75 Hz (medium) or 100 Hz (high)
Cut-off frequency for 45° phase shift:
500 Hz (low) or 1000 Hz (high)
Adjustable from 100 to 25'000 rpm
(initialization delay before PWM on)
XtrapulsPac 230 V: 6.25 ms
Encoder position output for CANopen®
version.
No encoder output available on
EtherCAT® version
Quadrature signals A & B with Z marker pulse.
RS 422 line transmitter: 20 mA per output
Programmable resolution: 64 ppr to 16384 ppr (according to
max. motor speed).
Max. pulses frequency: 437 kHz
Accuracy in arc minutes = (8 + 5400/resolution)
Note: the total position accuracy must take into account the
accuracy of the resolver used.
Transmitter resolver:
Excitation frequency: 8 kHz
Max. output current = 30 mA
Transformation ratio: 0.3 to 0.5 (other values are factory set)
SinCos tracks:
1 Vcc to 4 Vcc Sin and Cos signals
 Loading...
Loading...

