- 15 -
1 Product Information
1
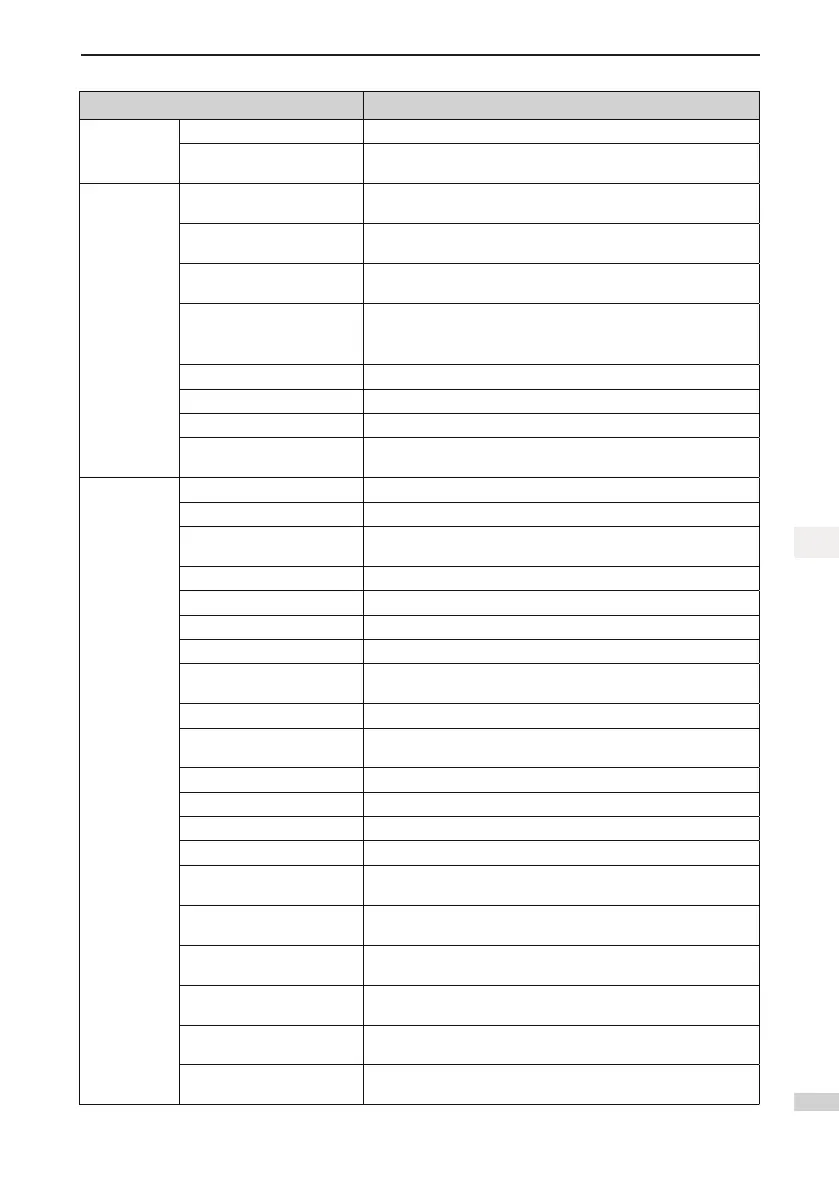
Item Specication
PG interface
PG car types Open-collector, push-pull, SIN/COS, Endat absolute
PG card signal frequency-
division output
OA, OB orthogonal
Input/Output
signal
Optocoupler input control
power
Isolated 24 VDC
Low-voltage optocoupler
isolated input
24 DIs, optocoupler control signal is isolated 24 VDC power input
High-voltage optocoupler
isolated input
4 DIs
Relay output
6 normally-open contacts, single-pole single-throw
5A contact switching capacity, contact load (resistance): 5 A, 250
VAC, or 5 A, 28 VDC
USB interface Commissioning with mobile phone
CAN communication port 2 (CTB communication, parallel control or group control)
Modbus communication 2 (HCB communication, community monitoring or IoT)
Analog input terminal
1 single-end or differential input, input voltage range: -10 V to
+10 V, accuracy 0.1%
Protection
functions
(To be
continued)
Motor overload protection Motor protection curve set in parameters
AC drive overload protection 60s for 150% of rated current, 10s for 200% of rated current
Short-circuit protection
Controller protection at occurrence of overcurrent due to any two
phases of UVW are short-circuited
Input phase loss protection Output disabled at input phase loss
Output phase loss protection Output disabled at output phase loss
Overvoltage threshold Bus voltage 800 V(380 V models), 400 V (220 V models)
Undervoltage threshold Bus voltage 350 V(200 V models), 150 V (220 V models)
Instantaneous power failure
compensation
Above 15 ms protection
Heatsink overheat Protection with thermistor
Stall prevention
Protection at speed deviation exceeding 15% of the rated speed
during running
Pulse encoder fault PG card wire-breaking
Braking unit protection Automatic detection and protection at braking unit abnormality
IGBT protection Overcurrent, short-circuit, overheat protection
Current sensor protection Self-check at power-on
Protection at input voltage
excessive
Detection of voltage exceeding 725 V for 400 V models, and
exceeding 360 V for 200 V models
Protection of output short-
circuited to ground
Output disabled when any phase is short-circuited to ground
during running
Output imbalance protection
Output disabled when imbalance between the UVW phases is
detected
Braking resistor short-circuit
protection
Detection during braking
Speed abnormality protection
Speed detection by encoder, protection at different running
stages (acceleration, deceleration, and constant speed)
Running time limit
Protection when the running time at a certain oor exceeds the
limit
 Loading...
Loading...