Version 3.00 | Optidrive P2 User Guide | 45www.invertekdrives.com
8
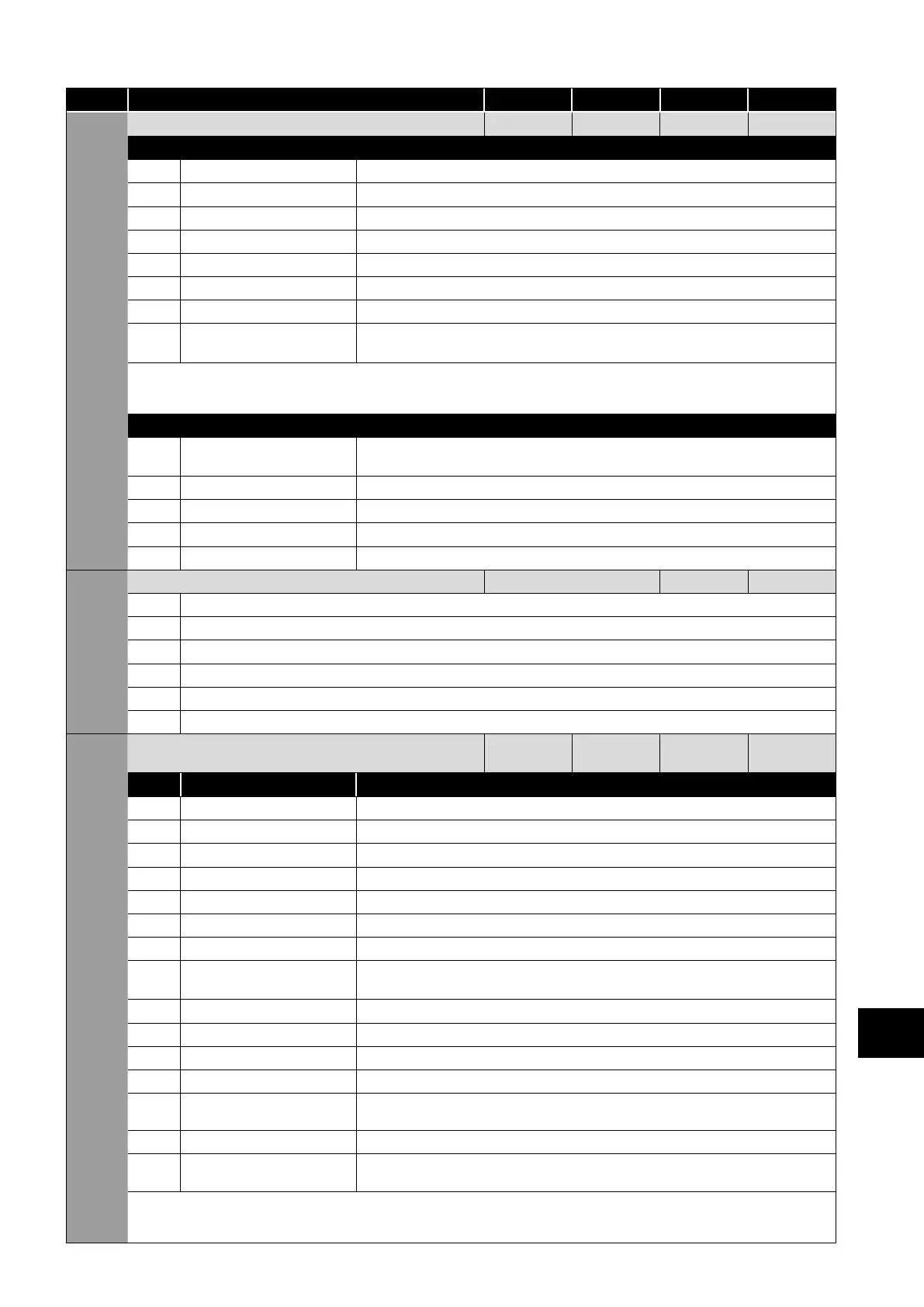
Extended Parameters
Par Parameter Name Minimum Maximum Default Units
P2-13
Analog Output 2 (Terminal 11) Function Select 0 12 9 -
Digital Output Mode. Logic 1 = +24V DC
0 Drive Enabled (Running) Logic 1 when the Optidrive is enabled (Running).
1 Drive Healthy Logic 1 When no Fault condition exists on the drive.
2
At Target Frequency (Speed)
Logic 1 when the output frequency matches the setpoint frequency.
3 Output Frequency > 0.0 Logic 1 when the motor runs above zero speed.
4
Output Frequency >= Limit
Logic 1 when the motor speed exceeds the adjustable limit.
5 Output Current >= Limit Logic 1 when the motor current exceeds the adjustable limit.
6 Motor Torque >= Limit Logic when the motor torque exceeds the adjustable limit.
7 Analog Input 2 Signal
Level >= Limit
Logic when the signal applied to the Analog Input 2 exceeds the adjustable limit.
NOTE When using settings 4 – 7, parameters P2-16 and P2-17 must be used together to control the behaviour. The output will switch
to Logic 1 when the selected signal exceeds the value programmed in P2-16, and return to Logic 0 when the signal falls below the
value programmed in P2-17.
Analog Output Mode
8 Output Frequency
(Motor Speed)
0 to P-01.
9 Output (Motor) Current 0 to 200% of P1-08.
10
Motor Torque
0 to 200% of motor rated torque.
11 Output (Motor) Power 0 to 150% of drive rated power.
12 PID Output Output from the internal PID Controller, 0 – 100%.
P2-14
Analog Output 2 (Terminal 11) Format See Below
-
0 to10V
0 to 20mA
4 to 20mA
10 to 0V
20 to 0mA
20 to 4mA
P2-15
User Relay 1 Output (Terminals 14, 15 & 16) Function
select
0 14 1 -
Setting Function Logic 1 when
0 Drive Enabled (Running) The Optidrive is enabled (Running).
1 Drive Healthy No fault or trip condition exists on the drive.
2
At Target Frequency (Speed)
Output frequency matches the setpoint frequency.
3 Output Frequency > 0.0 The motor runs above zero speed.
4
Output Frequency >= Limit
The motor speed exceeds the adjustable limit.
5 Output Current >= Limit The motor current exceeds the adjustable limit.
6 Motor Torque >= Limit The motor torque exceeds the adjustable limit.
7 Analog Input 2 Signal
Level >= Limit
The signal applied to the Analog Input 2 exceeds the adjustable limit.
8 Reserved No Function.
9 Reserved No Function.
10 Maintenance Due The internally programmable maintenance timer has elapsed.
11 Drive Ready 0 to 150% of drive rated power.
12 Drive Tripped The drive is not tripped, the STO circuit is closed, the mains supply is present and the
hardware enable input present (Digital Input 1 unless changed by the user).
13 STO Status When both STO inputs are present and the drive is able to be operated.
14 PID Error >= Limit The PID Error (difference between setpoint and feedback) is greater than or equal to the
programmed limit.
NOTE When using settings 4 – 7 and 14, parameters P2-16 and P2-17 must be used together to control the behaviour. The output
will switch to Logic 1 when the selected signal exceeds the value programmed in P2-16, and return to Logic 0 when the signal falls
below the value programmed in P2-17.
 Loading...
Loading...

