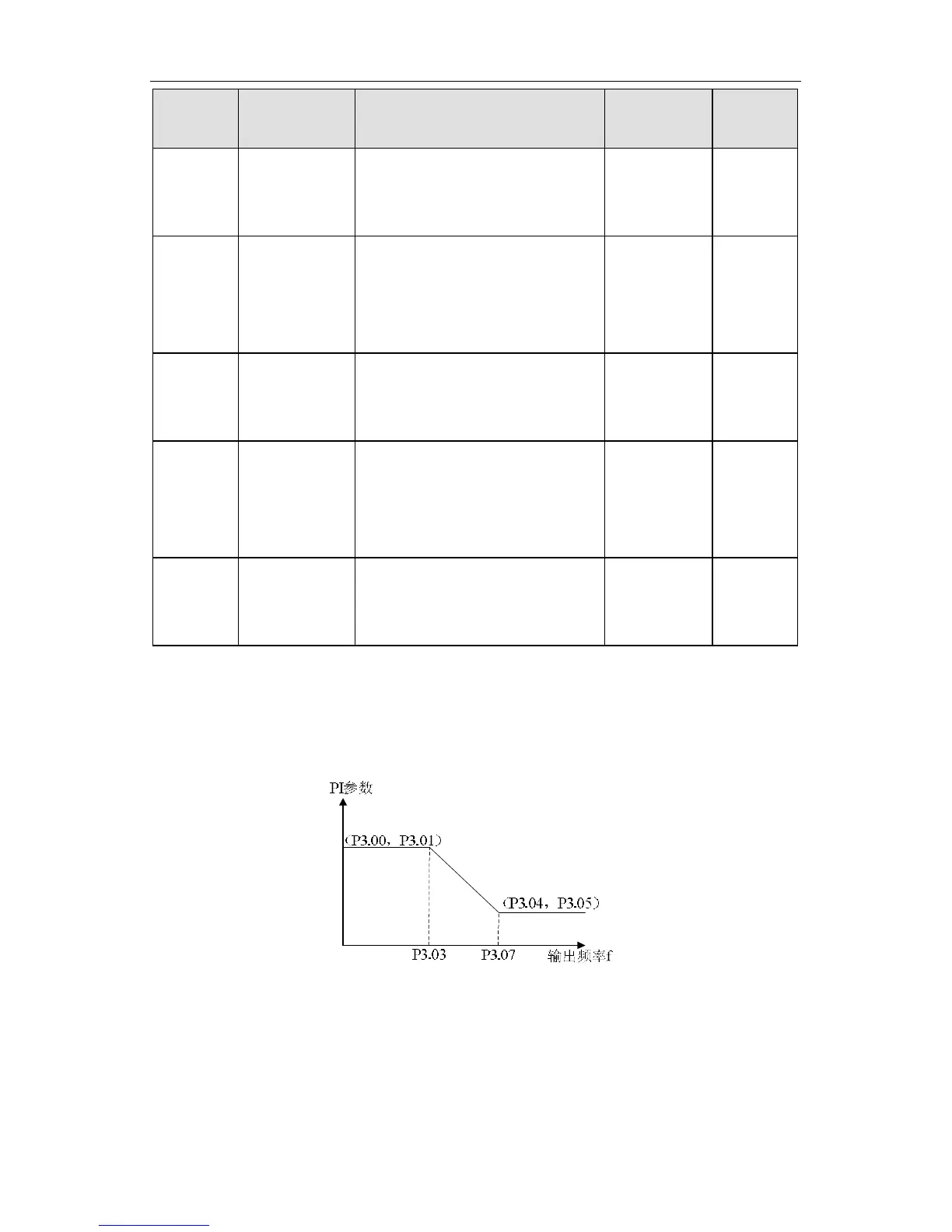
The above parameters are only valid for vector control. When under the low point switch
frequency (P3.03), speed loop parameter PI is P3.00 and P3.01, when over the high low
point switch frequency (P3.07), speed loop parameter PI is P3.04 and P3.05. Please
refer to following figure for details.
Figure 6.10 PI parameter diagram.
The system's dynamic response can be faster if the proportion gain KB
p
B is increased or
the integral time KB
i
B is decreased; however, if KB
p
B is too large or KB
i
B is too small, the system
becomes overshoot and tends to oscillate. If KB
p
B is too small, may cause the system
 Loading...
Loading...









