CHV180 series frequency inverter special for elevator Appendix A
.112.
(stopping quadric deceleration), P1.13 (stopping deceleration), P3.00 and P3.01 (PI
parameter of low speed), P8.06 (contracting brake close delay time).
A.1.5 Accuracy adjusting of elevator flat floor
If leveling error of each floor is different, adjust each position of flashboard to keep the
same errors on every floor, and adjust creeping speed of elevator (set by multi-step
speed) and P1.12 (stopping quadric deceleration).
A.2 Elevator running mode
There are two running modes for CHV180: multi-step speed and analog quantity
speed and the Multi-step speed are used as the main mode.
A.2.1 Multi-step speed mode (Contracting brake and contactor are controlled by
inverter)
In multi-step speed mode, the speed command can be selected by external multi-step
terminals. As in the following project of elevator control: contracting brake and
contractor are controlled by inverter. Detection the feedback signal of contracting
brake and contactor action and overhaul command are controlled by input terminal
(EXM). Run speed is given by MS1~ MS3 and the analog quantity of weighing
equipment are applied.
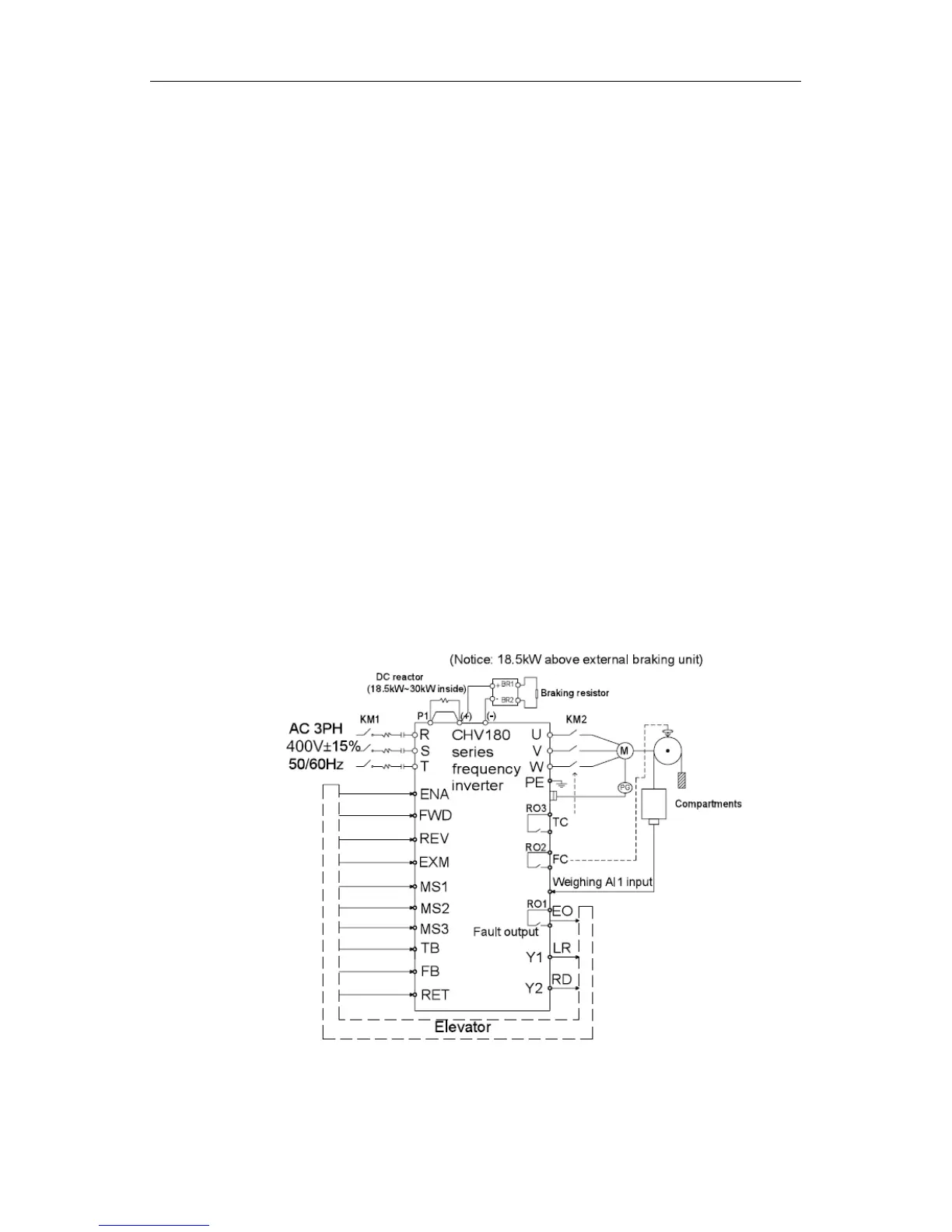
Wiring diagram is as follows:
Figure A.1 Wiring principles for Multi-step speed control.
Sequence chart of running is as follows:
 Loading...
Loading...









