between the reference and the feedback
changes, it needs more time to offset the
impact of continuous working and the
integration will change with the trend.
1: Stop integral adjustment when the
frequency reaches the upper and low limit. If
the integration keeps stable, and the trend
between the reference and the feedback
changes, the integration will change with the
trend quickly.
LED tens:
0: The same with the setting direction. If the
output of PID adjustment is different from the
current running direction, the internal will
output 0 forcedly.
1: Opposite to the setting direction. If the
output of PID adjustment is different from the
current running direction, the closed-loop
adjustment output opposite to the current
running direction is executed.
Multi-step speeds are within the range of
--f
max
–f
max
, and they can be set continuously.
The VFD supports the setting of speeds of 16
steps, which are set by combined codes of

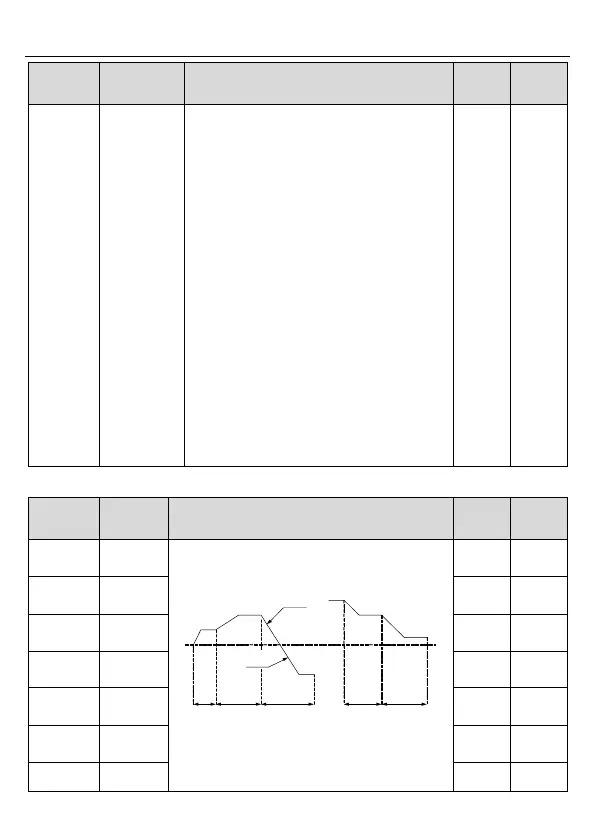 Loading...
Loading...







