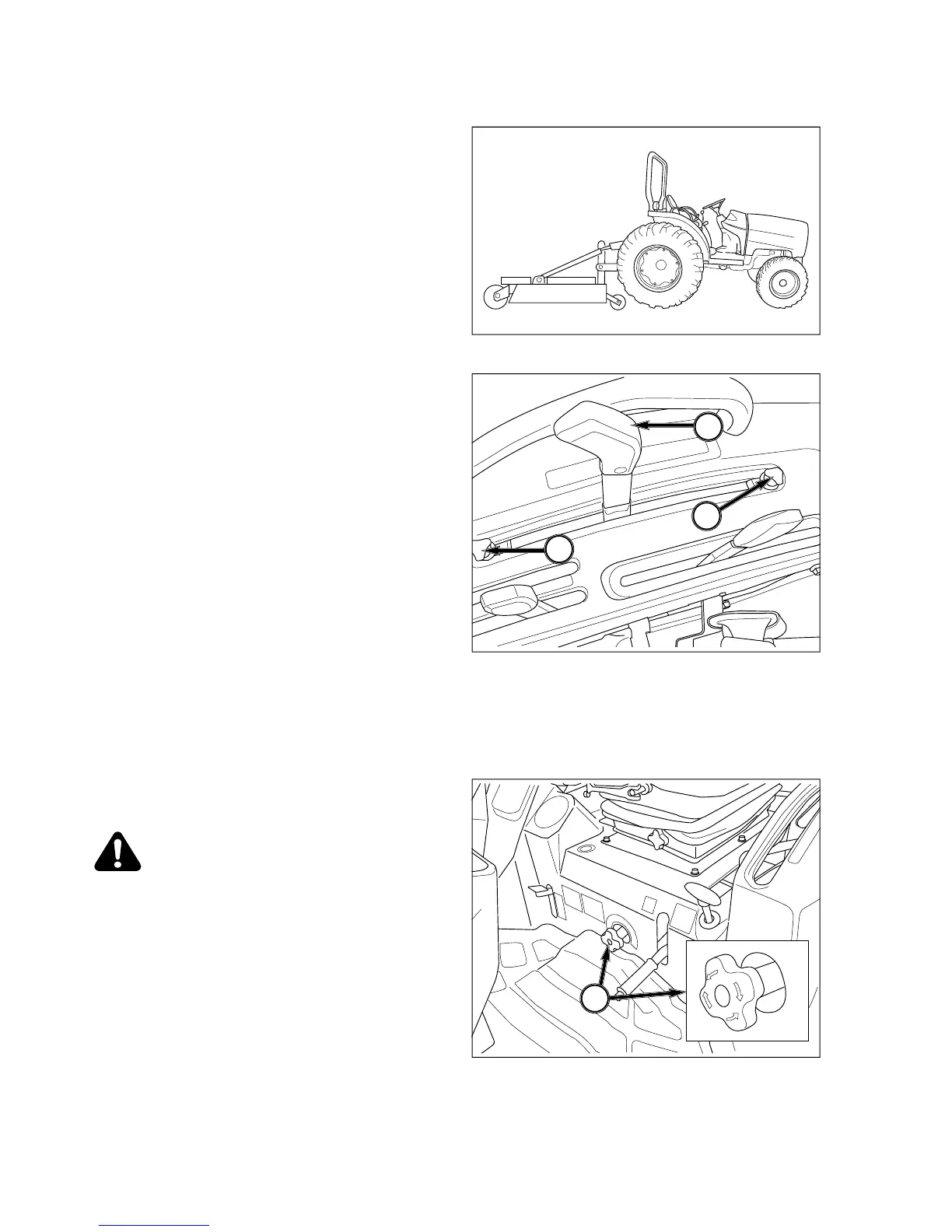
Position Control
FIG. 5-40
imple-
ments and other operations requirin
implement to be
kept at constant hei
round. Also used with
tool bars havin
flexible row units and implements
Lever Positions - Use position control lever,
1, to ad
ust hitch and implement position.
NOTE: Front lever stop, 2, can be set to contac
osition control lever in implement work posi
ion. This enables implement to be returne
o identical position after hitch has been
aised for turning, transporting, etc. Rear le
, can be set to limit raising height,
n Tractor and implement in field
and move position control lever, 1,
ustable stops, 2 and 3, as
- Move position lever, 1, backward
to raise implement. Finish turnin
ainst stop to resume operation.
To Finish Work and Transport - Move position control
rearward in quadrant.
FIG. 5-42
rate control knob, 4.
CAUTION: When usin
ents with PTO driveline, make sure
TO drive shaft has minimum 51 mm
does not bind
drive shaft universal
oints due to extreme
drive shaft an