76
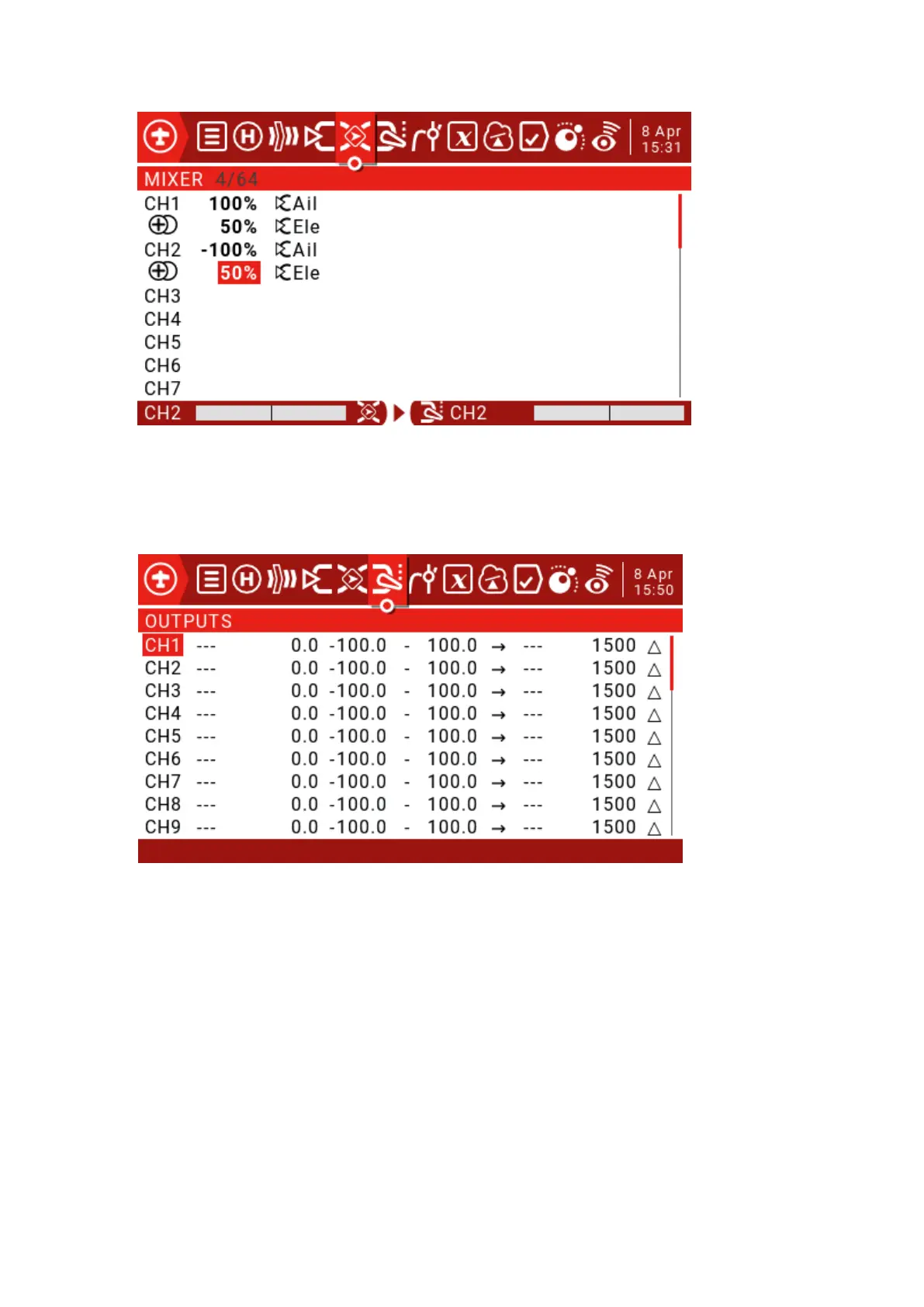
9. Configure the output:
The next step is to adapt the pure logic output of the mixing phase to the mechanical properties of the
model. Here you can configure the minimum and maximum stroke outputs, channel inversion, and adjust
the servo center point using PPM center adjustment, or add offset using subtrim.
Introduction to global variables:
We can also use global variables to set the value of delta wing mixing.
 Loading...
Loading...
