41
The output of the CCPM mixer is CYC1, CYC2 and CYC3, and the servo channel needs to be
assigned on the MIXER page.
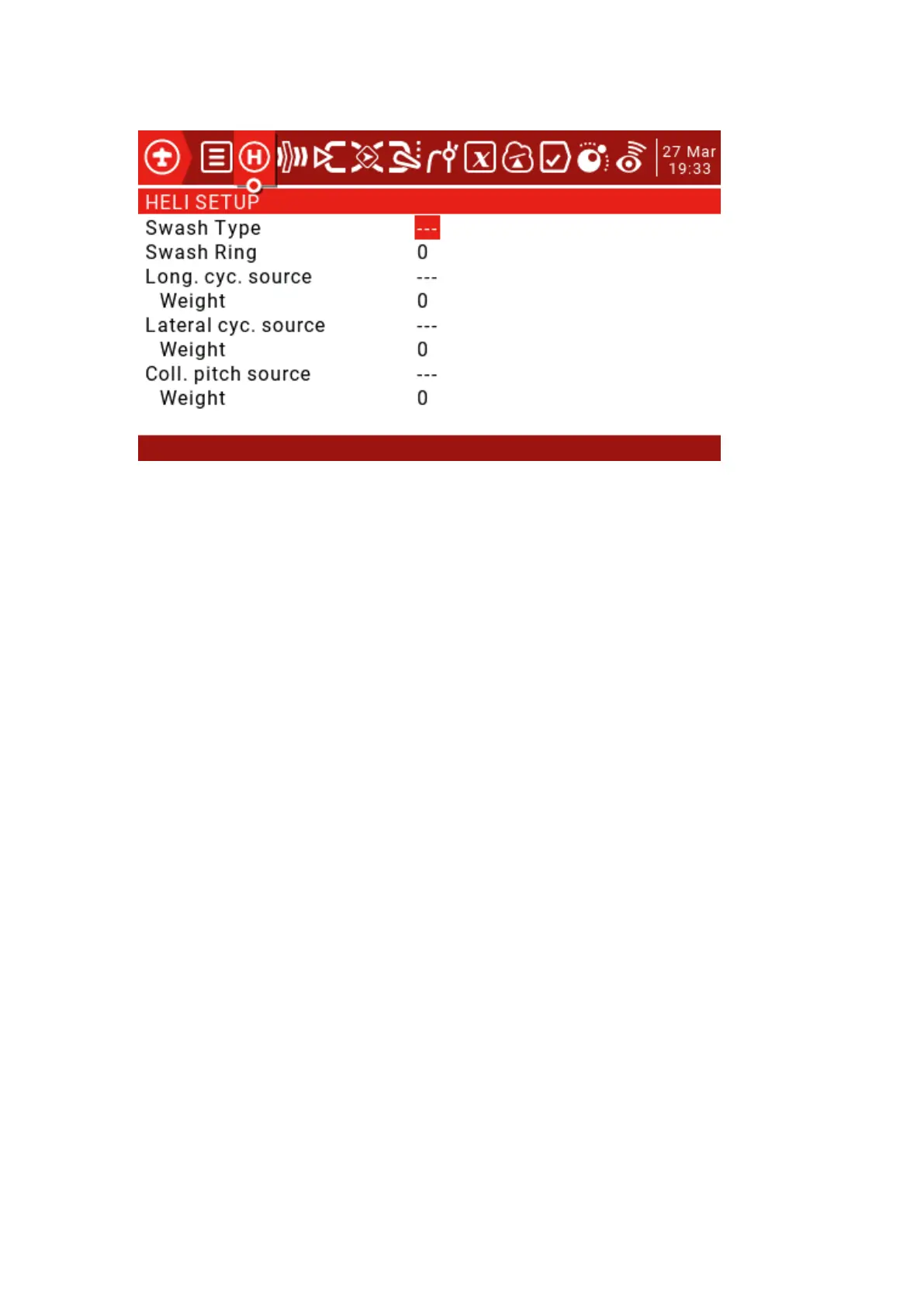
Swash Type: Swashplate type selection (90, 120.120X, 140). 120X means that cyc1 is rotated
by 90 degrees.
Swash Ring: The value is 0-100.
Longitudinal cyc.source: ELE is usually selected from the Inputs.
Weight: 0-100.
Lateral cyc.source: AIL is usually selected from the Inputs.
Weight: 0-100.
Collective pitch source: Usually an input defined with one or more pitch curves.
Weight: 0-100.
3.7. Flight Modes
Airplane mode allows you to set up a model for a specific mission or flight behavior.
Fixed-wing aircraft may have flight modes that allow for normal, precise flight and slow roll and
roll cycles. Helicopters have some modes, such as normal for ascent and descent/landing, such
as 1 for aerobatics and 2 for 3D.