sideration. When inserting the connectors, turn them until they clearly
lock into the coding elements (twist-proof).
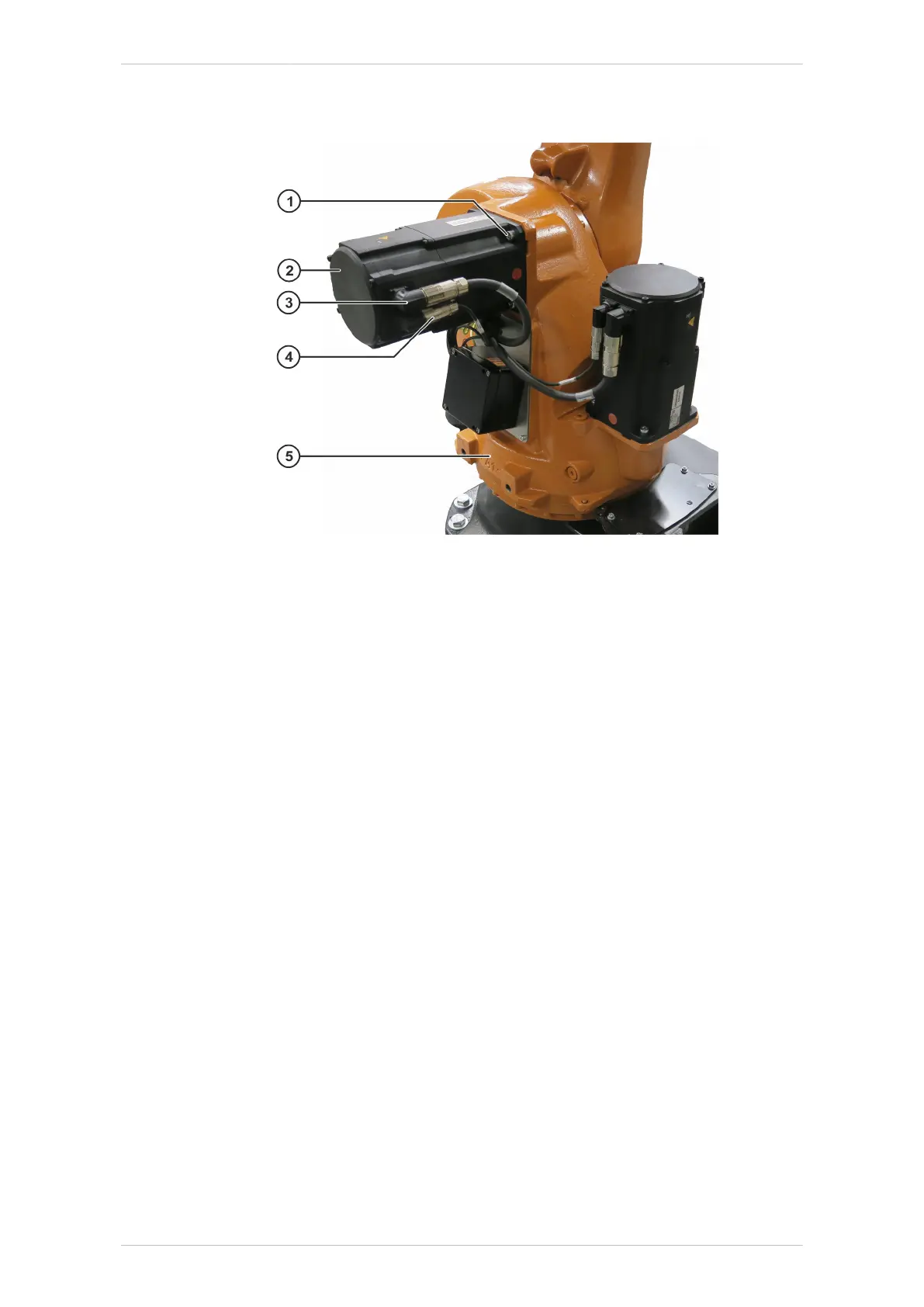
Fig. 9-5: Motor A2
1 M10x25-8.8-A2K Allen screw
2 Motor A2
3 Connector XM2
4 Connector XP2
5 Rotating column
9.2.4 Removing the equipment securing the link arm
Procedure
1. Slacken the rope sling and detach from the crane.
2. Remove the rope sling from the robot.
KR IONTEC
MA KR IONTEC V4 | Issued: 11.05.2021 www.kuka.com | 237/344
Repair
 Loading...
Loading...

