CS3E-E Series EtherCAT Closed Loop stepper drive User Manual
Note:
(1) Read State2: when inputs function are valid, at this time, it has nothing to do with which input port, bit0~bit26 of 0x60FD will
change to value 1. For example: when IN5 input port is set to POT and input signal is valid,then bit0 of 0x60FD will be value 1.
(2) When input function is set to GPIO,at this time, different input ports correspond to different bit of 0x60FD.
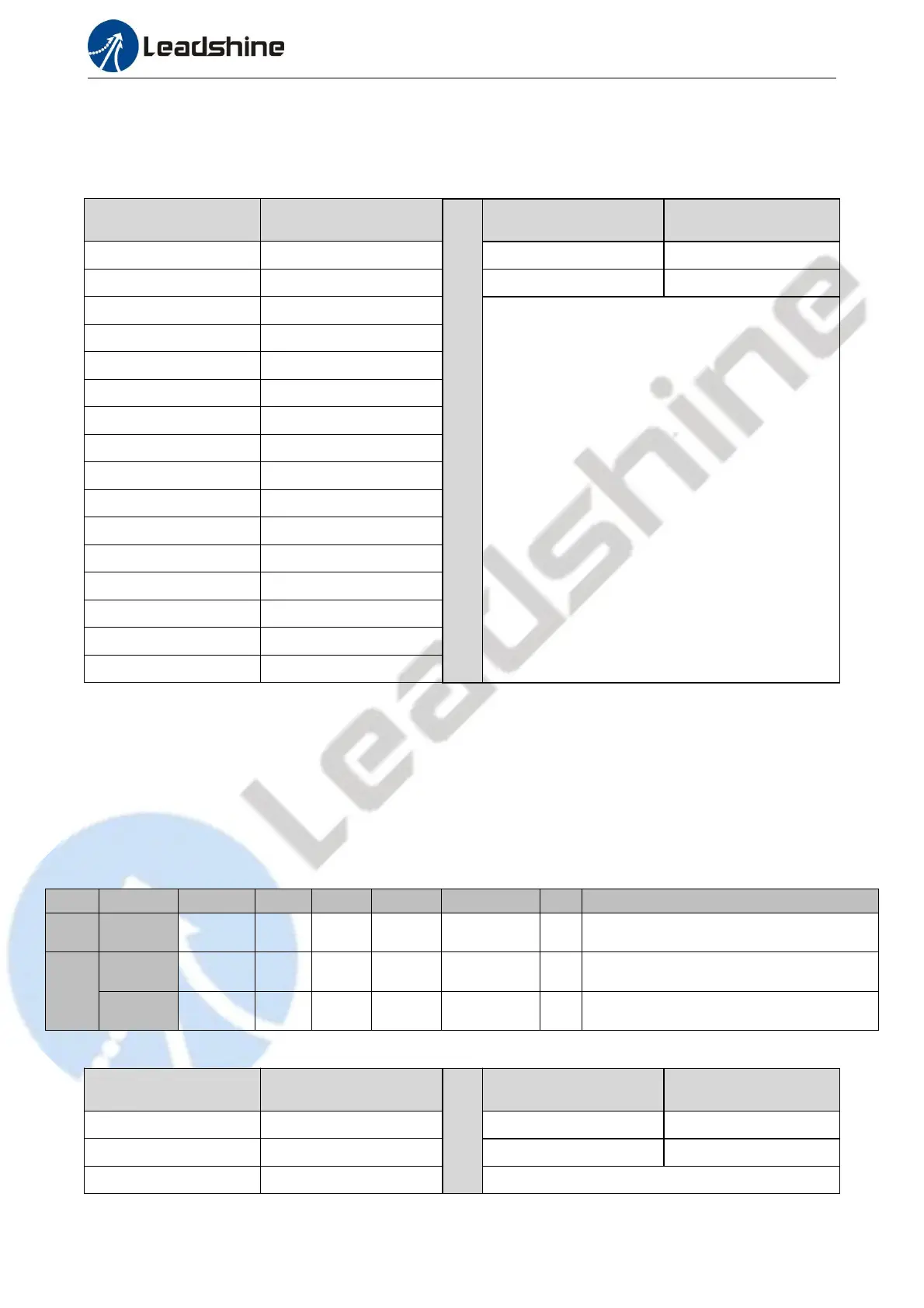
4.3.2 Input Ports Filter Time & Polarity Value
Therefore,Value of 0x2152 (Decimal) = Input port function value + Filter time value + Polarity value.
For Example:
1. IN1 needs to be set as quick stop function,filtering time is 20ms and polarity is NC:
0x2152+01 = 20+128+2304=2452(0x994)
2. Need to set the polarity of IN3,IN4,IN5 to NC:
0x2152+03 =128+22 =150(0x96)
0x2152+04 =128+1 =129(0x81)
0x2152+05 =128+2 =130(0x82)
4.3.3 Output Ports Function & Polarity Value
Upper 8 bits indicate the status of digital outputs
Default is alarm output, take effect changes need
restart power
Default is brake output, take effect changes need
restart power
More detail: