CS3E-E Series EtherCAT Closed Loop stepper drive User Manual
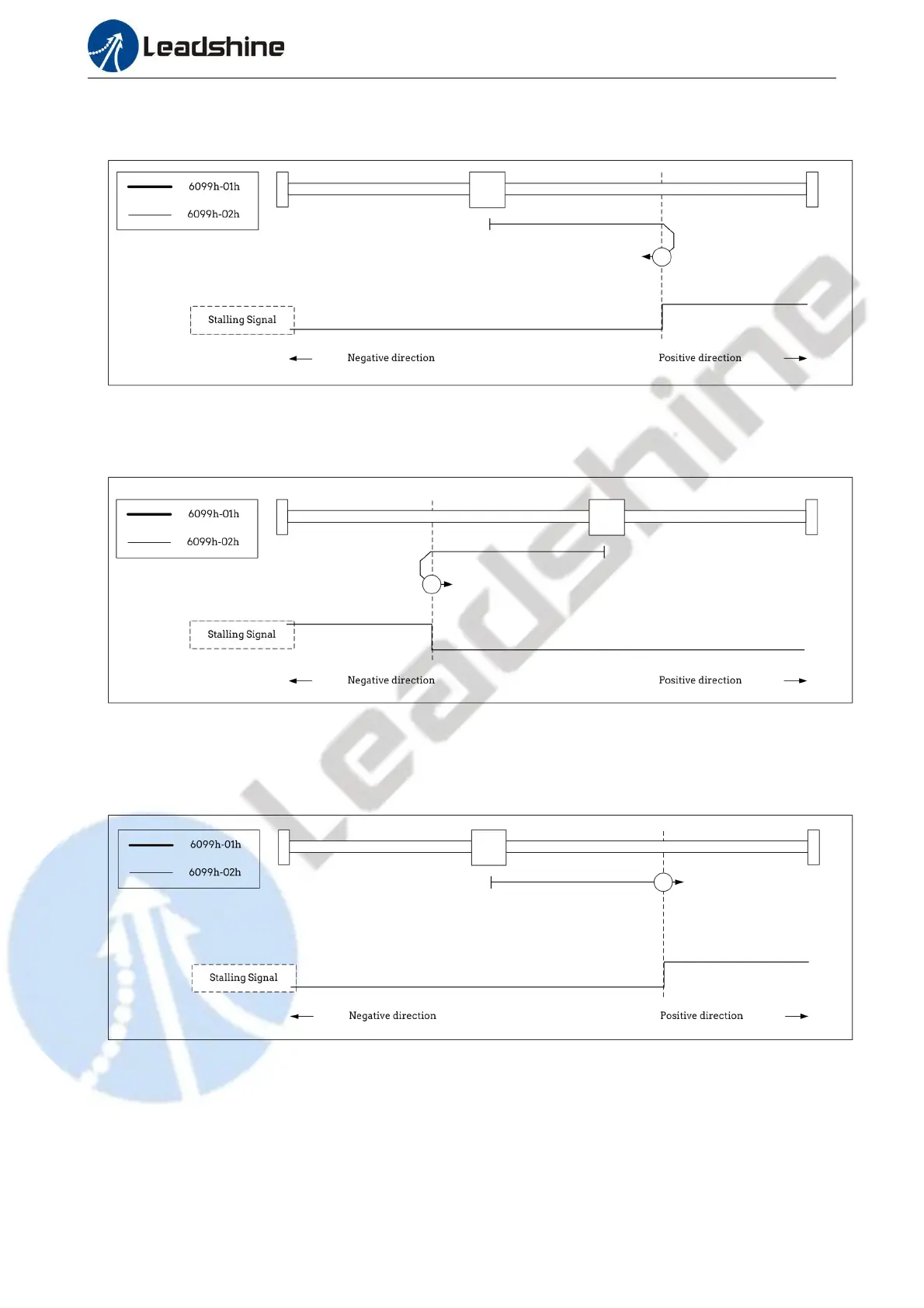
Method -3 requires Stalling Signal.
During the motor running in positive direction, when reaching the stalling signal, it will slow down and
stop,then run in reverse,at last stops. ( stop position as the zero position)
Method -3
Method -4 requires Stalling Signal.
During the motor running in negative direction, when reaching the stalling signal, it will slow down and
stop,then run in reverse,at last stops. ( stop position as the zero position)
Method -4
Method -5 requires Stalling Signal.
During the motor running in positive direction, when reaching the stalling signal, it will stop immediately.
( Stalling Signal as the zero position)
Method -5
Method -6 requires Stalling Signal.
During the motor running in negative direction, when reaching the stalling signal, it will stop
immediately. ( Stalling Signal as the zero position)