9300 Servo PLC
System blocks
2.12 MCTRL_MotorControl
2-57
L
ServoPLC EN 2.0
2.12.17.3 OC5 - I x t overload monitoring
No. Monitoring function Display System variable TRIP Message Warning Off
015 I x t overload OC5 MCTRL_bIxtOverload_b •
• Default setting ü Setting possible
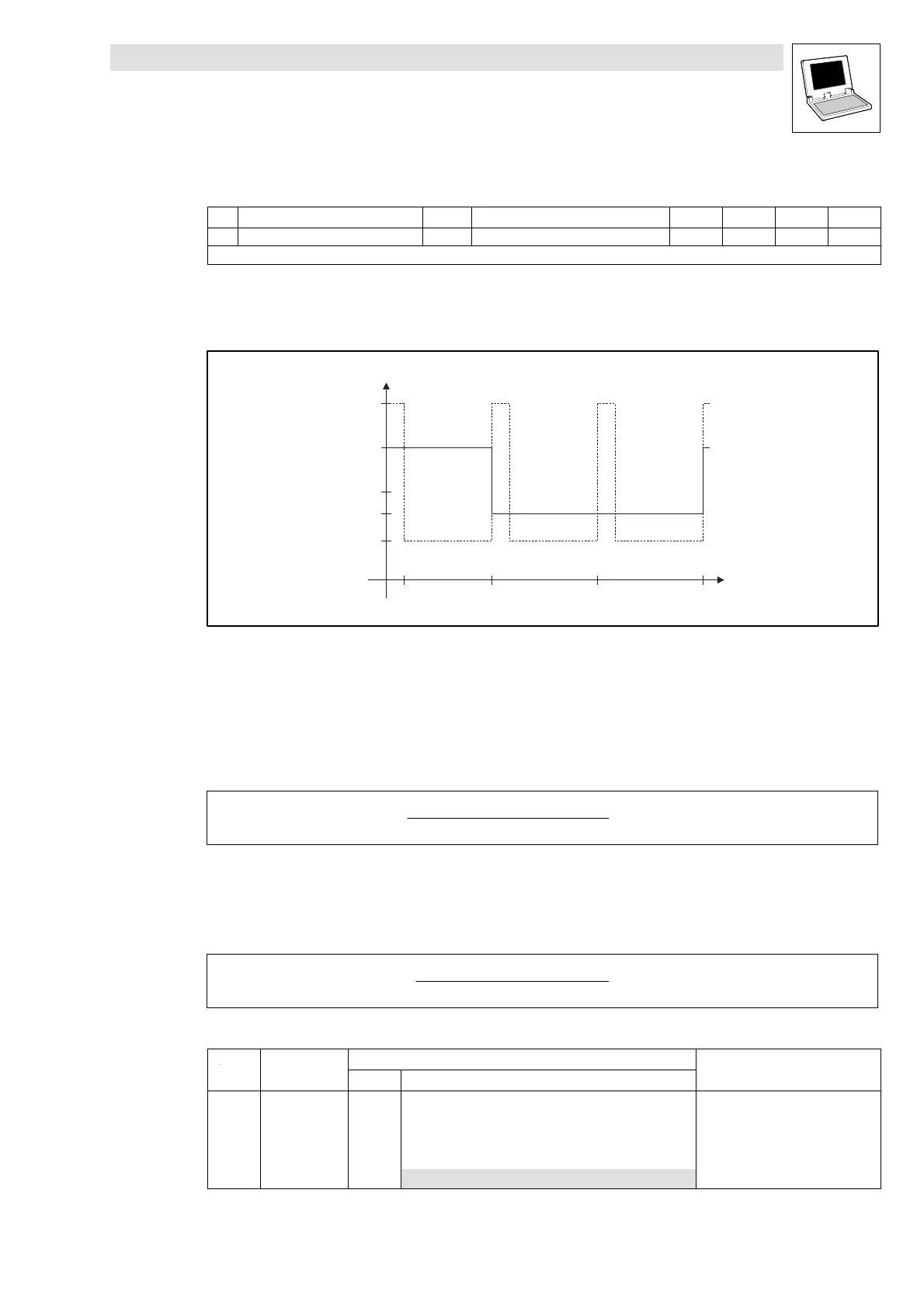
Overcurrent diagram for error message OC5
The following diagram shows the max. permissible overcurrent over time.
150
100
75
200
I [%]
Motor
10 60 120 180
t [s]
44
Fig. 2-26 Overcurrent diagram
The max. permissible overcurrent depends on the set I
max
limit in C0022. (^ 2-52)
I
max
limit set under C0022 ≤ 150 % I
r
:
• Within 180 s the arithmetic mean of motor current must not exceed 100 % of the rated
controller current.
• Example: Arithmetic mean :
60 s
⋅
150 %
+
120 s
⋅
75 %
180 s
=
100 %
I
max
limit set under C0022 > 150 % I
r
:
• Within 60 s the arithmetic mean of motor current must not exceed 70 % of the rated controller
current.
• Example: Arithmetic mean :
10 s
⋅
200 %
+
50 s
⋅
44 %
60 s
=
70 %
The current controller load is displayed under C0064:
Code LCD
Possible settings
IMPORTANT
Lenze Selection
C0064 Utilization
g
Controller load I x t duri ng the last
180 Sekunden
• C0064 >100 % releases Trip OC5
• Trip reset is possible only if C0064
<95%
0 {1 %} 150
efesotomasyon.com - Lenze

 Loading...
Loading...



